Self-calibration algorithms in a small motor driver IC with an integrated position sensor
a self-calibration algorithm and position sensor technology, applied in the direction of electric programme control, program control, instruments, etc., can solve the problems of reduced range of travel, offset in the start-of-travel position of the motor, and difficulty in achieving precise linear motion control of such motors, so as to improve speed, enhance accuracy, and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
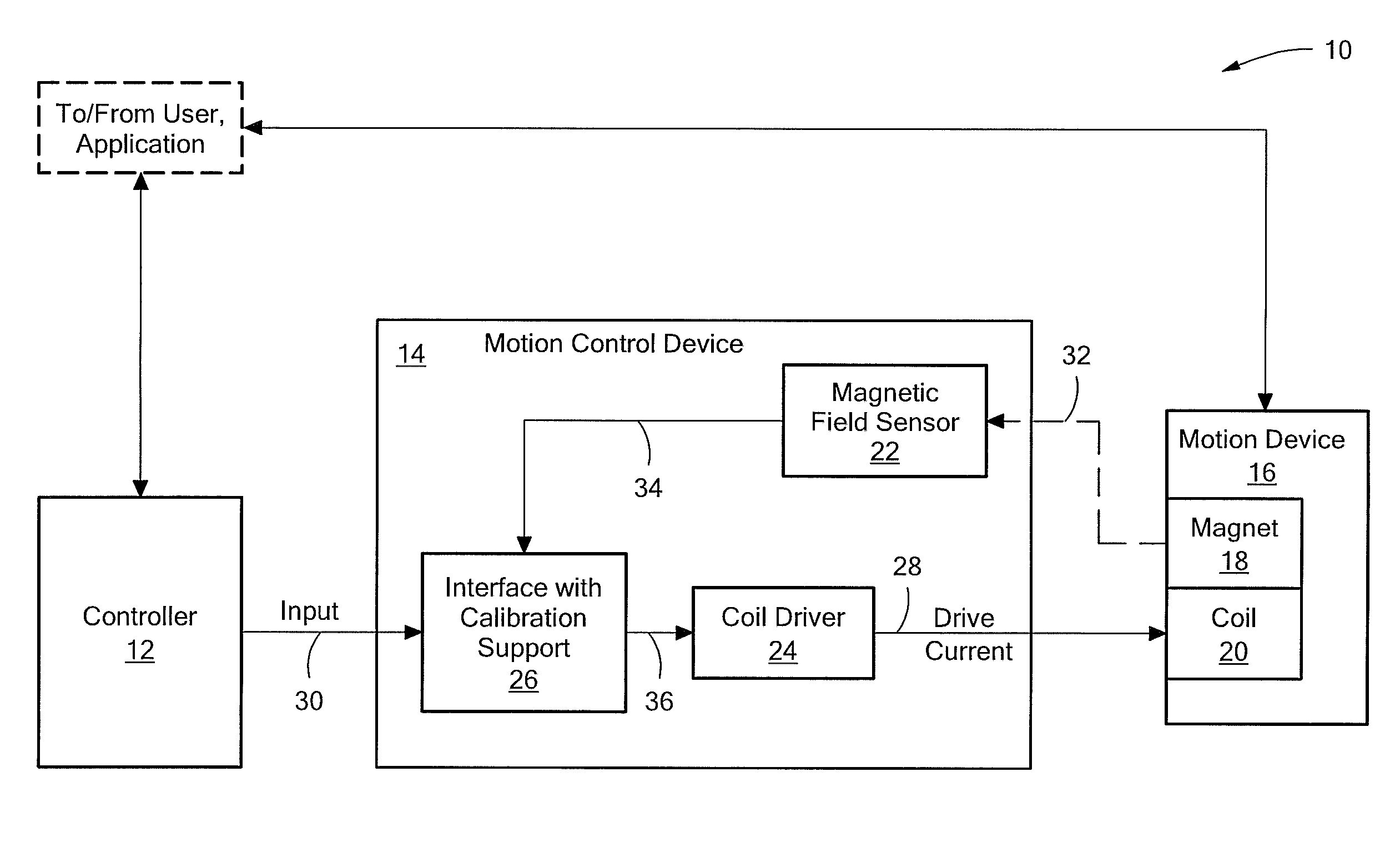
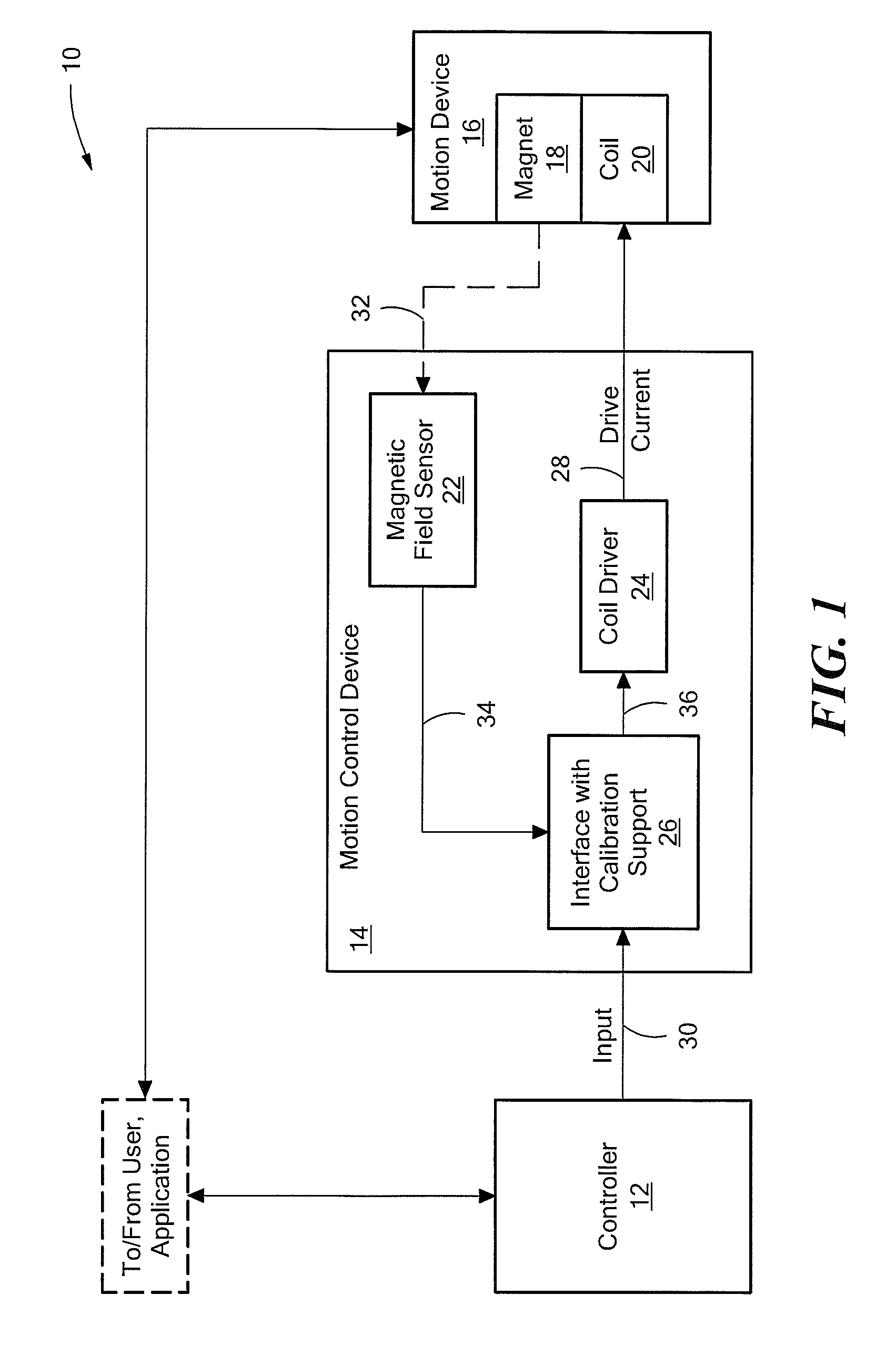
FIG. 1 shows an exemplary control system 10 that provides closed-loop motion control to a positioning application. The control system 10 includes a controller 12 connected to a motion control device (or “device”) 14. The control system 10 also includes a motion device 16, which includes an assembly having a magnet 18 and a coil 20. The magnet / coil assembly connects to a device or structure to be moved for a given application. In one embodiment, described herein, the magnet 18 is movable relative to the coil 20 and the control system 10 controls the movement of the magnet 18 with the coil 20. The motion device 16 may be any type of linear motion device, for example, a linear motor such as a voice coil motor (VCM). The positioning application may be any application that utilizes a displacement produced by the motion device.
The motion control device 14 includes a position sensor shown as a magnetic field sensor 22, a coil driver 24 and an interface with calibration support 26. The magn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com