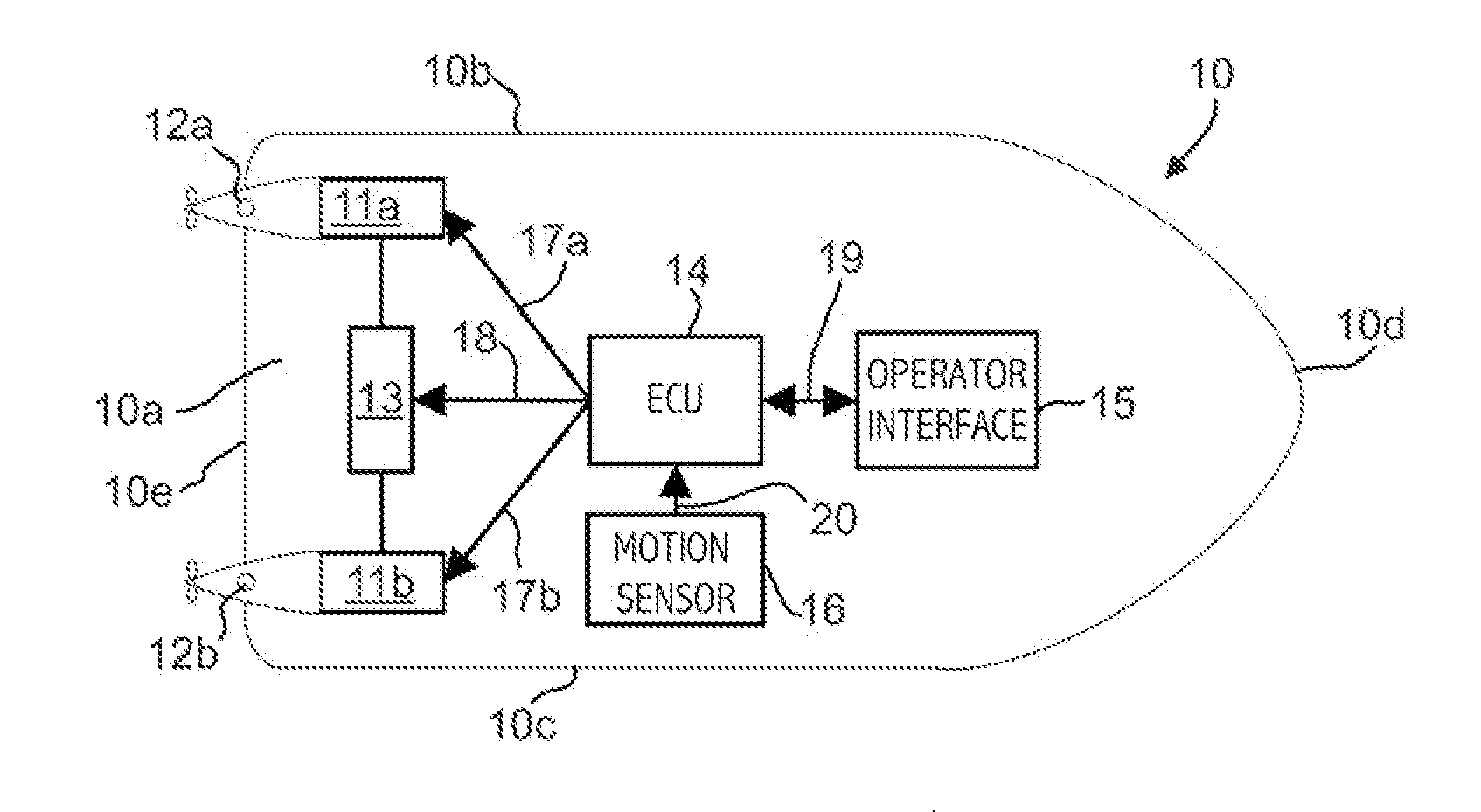
[0006]The aforementioned drawbacks and disadvantages of these prior art position management systems have been identified and a solution is set forth herein by the inventive position
management system and method which comprises two propulsion units, a steering mechanism for controlling the propulsion angle of the propulsion units, and a unique method of manipulating thrust vectors to achieve precision maneuvering. Additionally the invention comprises art
engine control unit for communicating propulsion angle commands and for communicating thrust commands for the at least two propulsion units; an
operator interface for communicating operator commands; and movement sensors for communicating information on the motion of the craft. The preferred embodiment also includes a
variable length draglink that simplifies controlling the propulsion angle of the propulsion units. The invention enables a watercraft to move forward / aft, laterally, obliquely lateral, with or without rotation such that docking the craft is much easier and more precise than the prior art.
[0007]One feature of the present invention is the
variable length draglink that is coupled to the propulsion units. In the preferred embodiment, the draglink comprises a screw jack
system comprising a jack screw and an
electric motor. The
electric motor turns the jack screw and thereby changes the length of the draglink. The length of the draglink controls the
vector angle between the thrust vectors of the propulsion units and enables simple yet precise maneuvering of the craft. In the preferred embodiment, the draglink is shortened to increase the
vector angle and, conversely, it is lengthened to decrease the
vector angle. When the appropriate vector angle is achieved the thrust vectors from the propulsion units combine to yield a desired net thrust vector on the craft. An
advantage of the draglink is that by controlling the length of the draglink, precision maneuvers are easily achieved. Precision maneuvers comprise rotation of the craft about a stationary point, lateral motion of the craft without
forward velocity or rotation, obliquely
lateral movement, and combinations of these maneuvers. An aspect of the invention is that it does not require independent steering of the propulsion units since the steering is accomplished with a draglink coupled to both propulsion units.
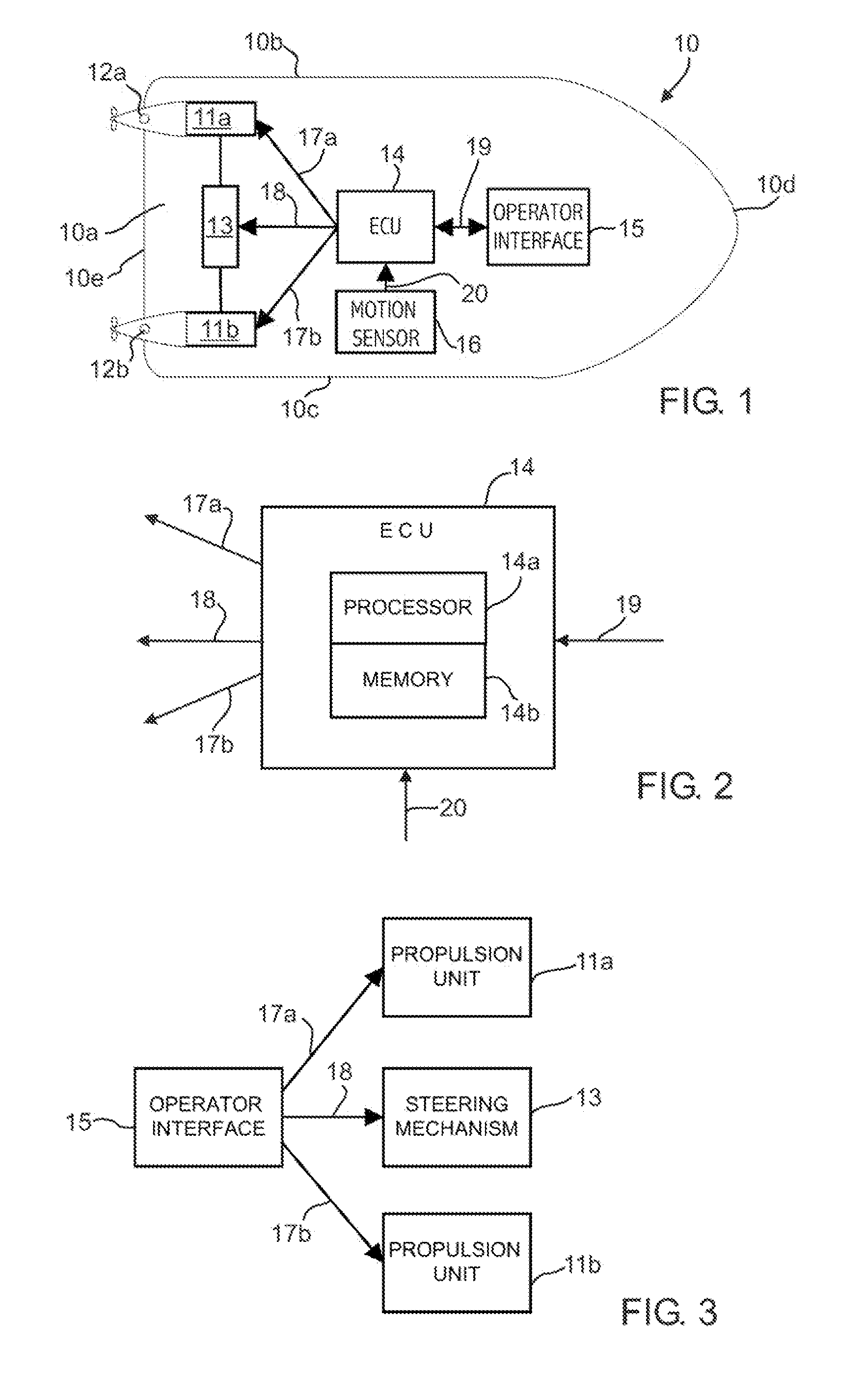
[0008]Another feature of the present invention is an
engine control unit that generates thrust commands and propulsion angle commands to achieve desired maneuvers. Initial thrust commands and propulsion angles are preferably selected from predetermined data generated during sea trials. This predetermined data is stored in memory. The
control unit uses these initial values as a “first guess” and then makes adjustments to the thrust and propulsion angles to compensate for environmental conditions such as wind, eddy currents, or the like that affect movement of the craft. Another aspect of the invention is that it simplifies the maneuvering process to such an extent that an engine
control unit is not required for a basic installation of the system.
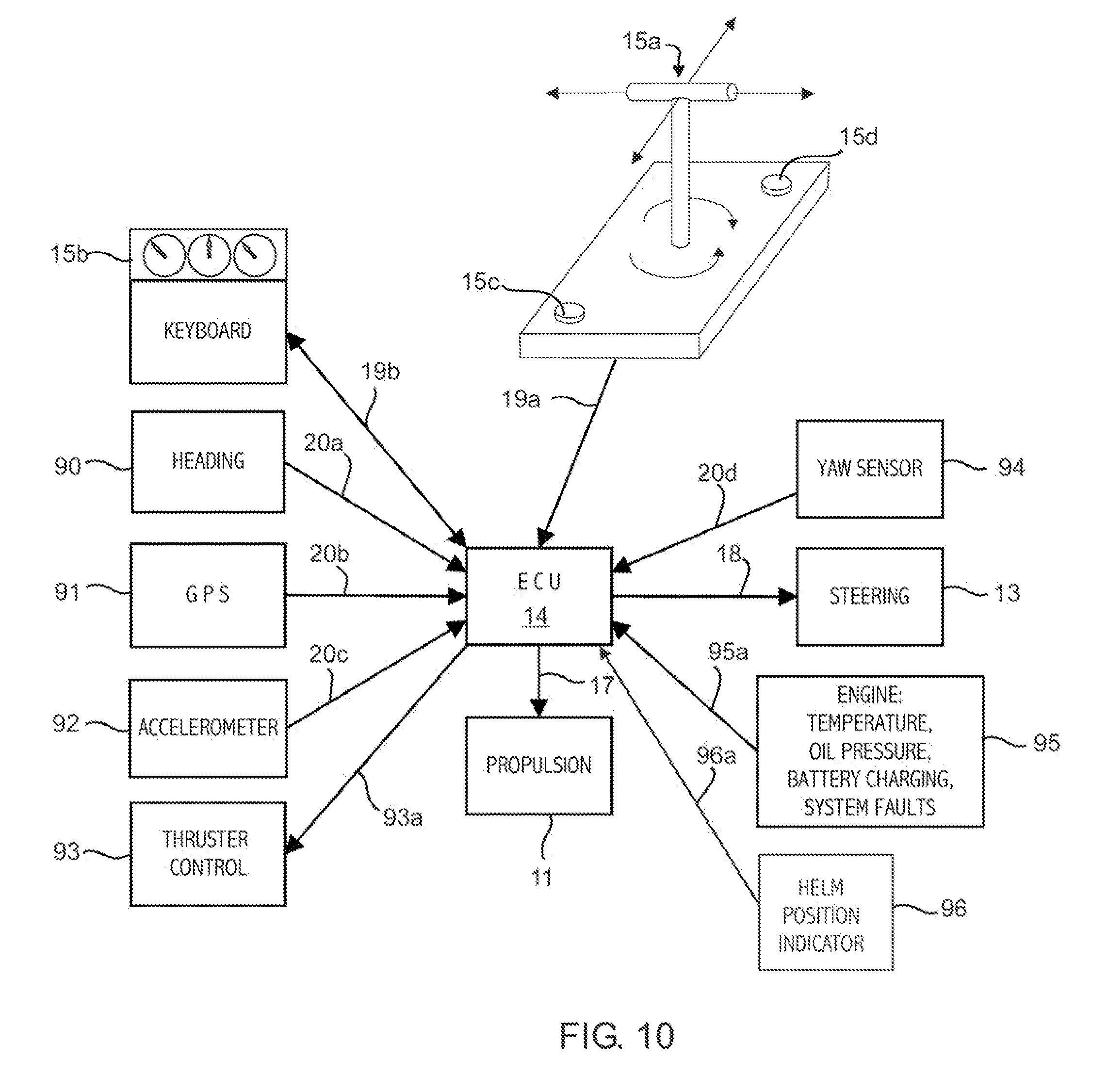
[0009]And still in another feature of the present invention is a
single point user interface used to communicate the watercraft operator's commands. In the preferred embodiment the operator moves a
joystick to communicate a desired movement of the craft in any direction. For example, rotation of the
joystick indicates a desire to rotate the watercraft and movement of the
joystick to the left or right indicate
lateral movement to port and starboard respectively. The interface includes an on-
station button to command the control unit to keep the watercraft at the current position. The joystick simplifies operation of the watercraft.
[0011]Another feature of the invention is that precision maneuvers can be achieved while the thrust magnitude of the propulsion units is equal but opposite. This is yet another simplifying aspect of the invention. Similarly, precision maneuvers can be achieved with propulsion angles that are equal but opposite. This is another simplifying aspect of the invention. These two features greatly simplify control of the craft.
[0012]To address the goals stated above, the inventive position
management system and method combines the unique steering mechanism and the method of thrust and propulsion angle control to allow a watercraft to be easily and precisely maneuvered. By simplifying operation and improving control of a watercraft the inventive system reduces the risk of damage to watercraft and docks and reduces stress on the
crew. The present invention is useful in many applications where a craft or vehicle benefits from improved and simplified control. While the primary application of the invention will likely be small to medium size twin engine watercraft, those skilled in the art understand that the invention is applicable to various other vehicles including, but not limited to, multi-engine watercraft, large ships, hovercraft,
lighter than air ships,
spacecraft, and aircraft. The invention may also be practiced with virtually any propulsion system including, but not limited to, inboard motors, outboard motors,
propeller systems, jet drives, or even thrusters or rockets. Application of the invention is not limited to docking maneuvers but is also useful wherever precision control or maneuvering is desirable. For example, the invention is useful in remaining on-station, compensating for variable winds, eddy currents, and the like. Of course, this description is in no way meant to be limiting in any manner.

 Login to View More
Login to View More  Login to View More
Login to View More