


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Reconstruction of human emulated robot working scene based on multiple information integration
A kind of operation scene and robot technology, applied in the field of robots, can solve the problems of large time delay, inability to provide three-dimensional information, limited viewing angle, etc., and achieve the effect of maintaining continuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
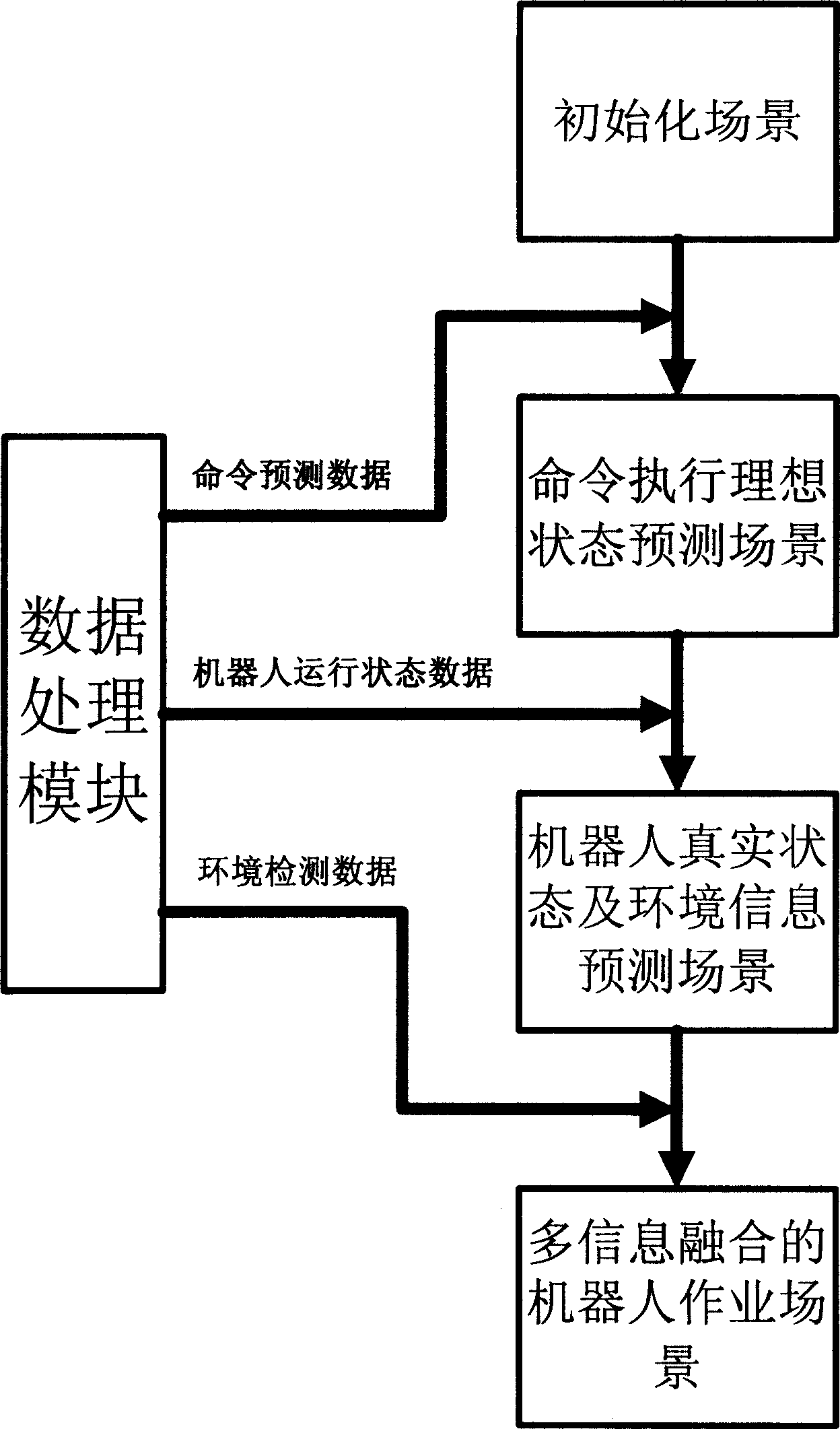
[0026] The working process of the whole humanoid robot working scene is as follows:
[0027] In the first step, the robot starts running and the teleoperation control starts. Start the computer program to display the established scene model. Use the initialization data to determine the initial position of the robot model and its operation target model, and determine the initial angle between the connecting rods of the robot model. What is generated in this step is the initialization interface of the scene.
[0028] In the second step, the scene data processing module receives the operation commands issued by the teleoperator in real time, interprets and generates predicted trajectory data. Use the prediction data to drive each model in the virtual scene to form a three-dimensional virtual scene. The scene generated in this step can show the ideal motion picture of the robot executing the commands issued by the operator.
[0029] In the third step, the sensor of the robot i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com