'Menneimasi pendulum arm' and stalking mechanical leg
A technology of mechanical legs and horses, which is applied in the direction of mechanical equipment, transmission devices, belts/chains/gears, etc., and can solve problems such as difficult to popularize, expensive, and large inertial impact force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 2
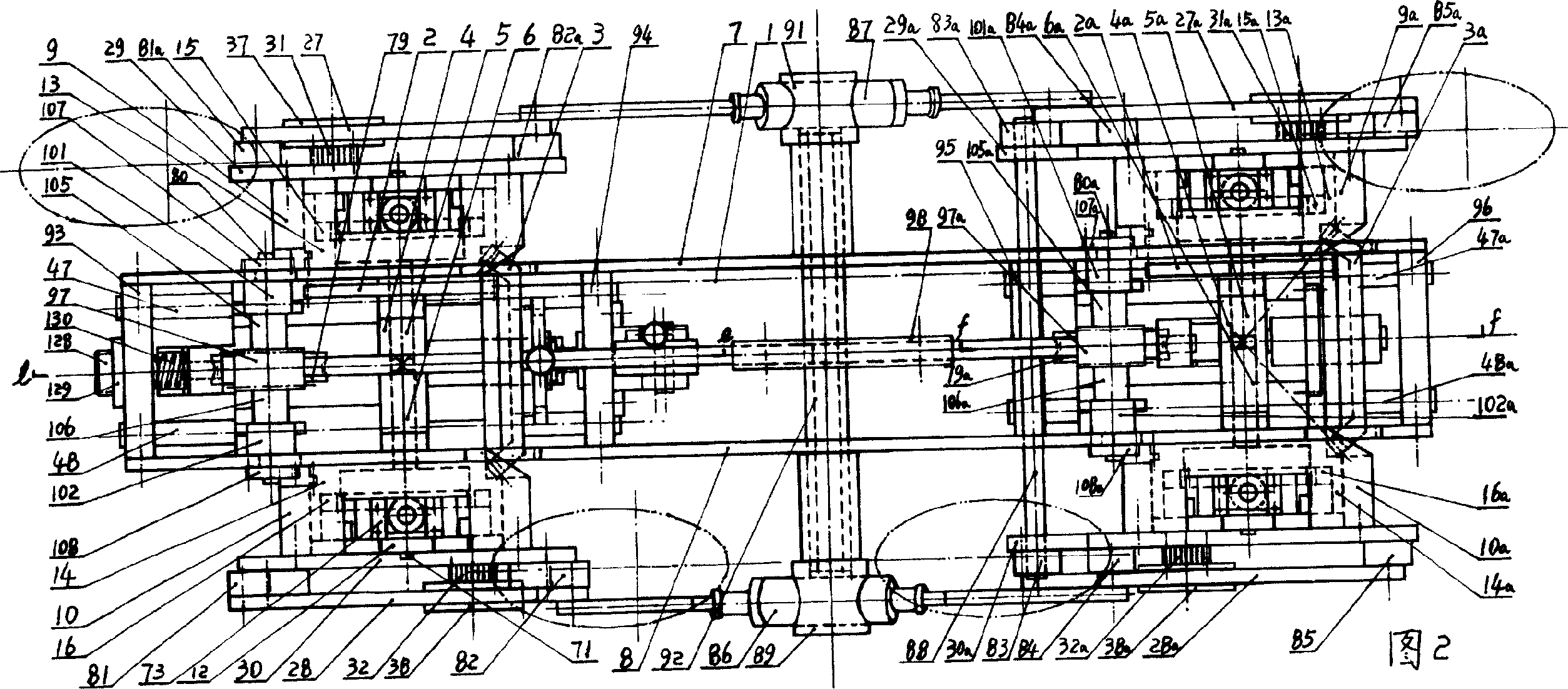
[0084] Embodiment 2, Figures 18, 19, 20, and 21 are examples of walking mechanical legs imitating insects or crawling gaits in the drive rod and walking mechanical leg device of the present invention, except that there are a few differences in the scaling leg lifting mechanism for walking Outside, the structural design of embodiment 1 can be copied indiscriminately for other main parts, if each leg of this embodiment all walks by fixed 2α pendulum angle, so just can save large, medium and small stepped stride gear or stepless Change the stride gear, just can save the worm wheel (79) on the relevant front and rear frame in the mechanism, (79a), worm screw (97), (97a) and four pinions (107), (108); 107a), (108a) etc. a large number of parts, the bevel gear (3) in the steering mechanism like this, (3a) just can be with ring gear sleeve (13), (14); On (13a), (14a) The bevel gear wheel point of the bevel gear has been kept in constant mesh, and the corresponding mechanism of the ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com