Magnetic field modulation motor magnetic circuit structure for robot arm joint
A technology of robot arm and magnetic field modulation, which is applied in the field of robotics, can solve the problems of the servo motor speed cannot be reduced, the transmission structure is complicated, and the transmission efficiency is low, so as to improve the dynamic response ability and control accuracy, simplify the transmission structure, and reduce the speed ratio. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
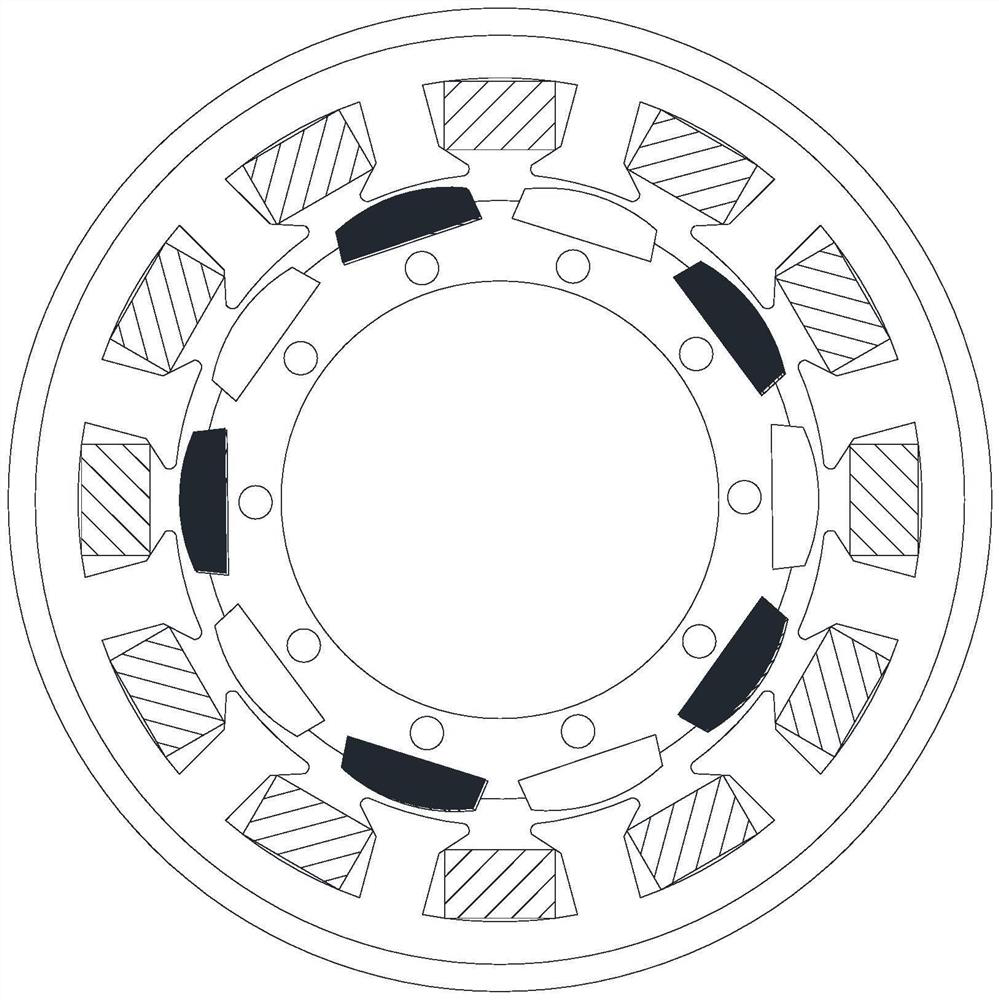
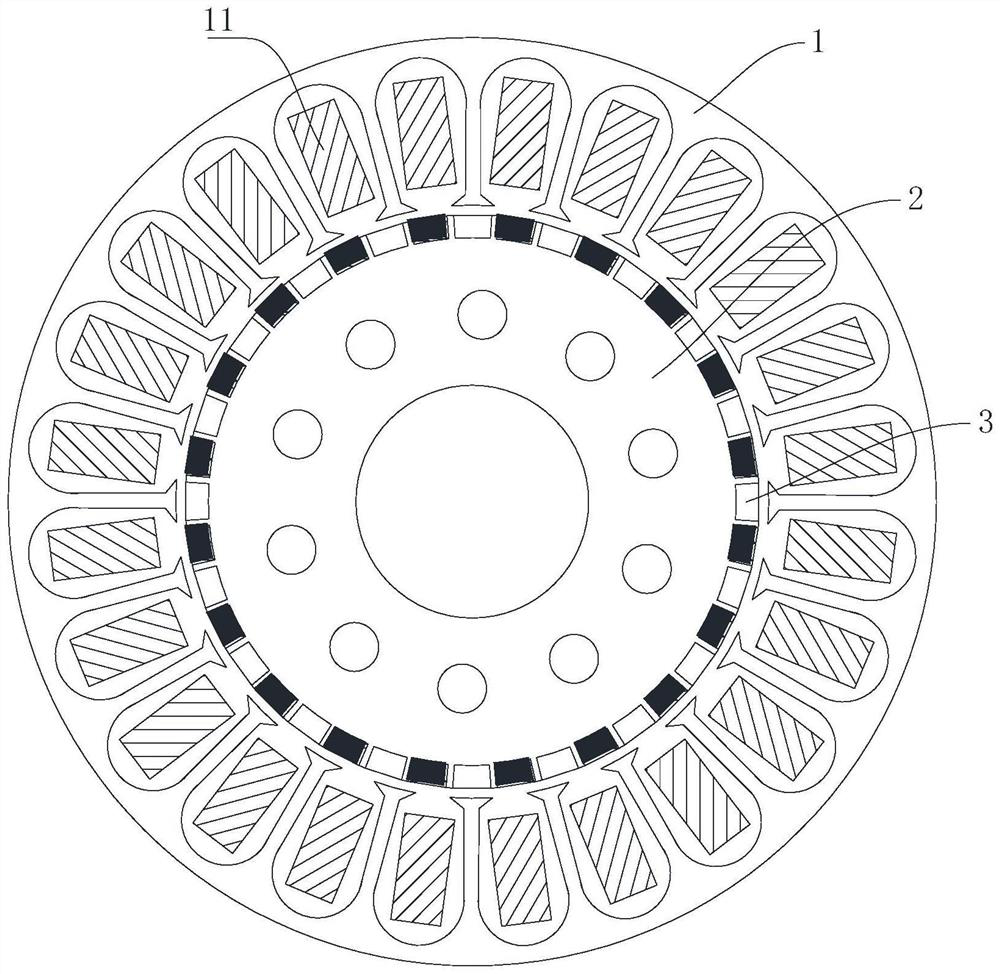
[0030] This embodiment provides a magnetic circuit structure of a magnetic field modulation motor for a robot arm joint, the structure is as follows Figures 3 to 5 As shown, it includes an outer stator core 1, an inner rotor core 2 and an 8-pole stator winding 11 that are coaxially arranged. The inner rotor core 2 is embedded in the outer stator core 1, and there is an air gap between them. The outer stator core 1 is provided with 24 outer stator teeth 12 equidistantly spaced on the inner wall along its own circumferential direction, and an outer stator slot 13 for installing the stator winding 11 is formed between adjacent outer stator teeth 12. The width of the outer stator teeth 12 The ratio to the width of the yoke portion of the outer stator core 1 is set to 1, and the ratio of the width of the outer stator teeth 12 to the width of the outer stator slots 13 is set to 0.1.
[0031] The inner rotor core 2 is provided with 40 lugs 21 at equal intervals along the outer wall ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com