Control method, device and control system of active fog ion disinfection robot
A control method and technology of a control device, which are applied in the directions of spraying devices, water supply devices, and spraying devices with movable outlets, can solve the problems of heavy manual work burden, etc., and achieve the advantages of improving utilization rate, improving disinfection effect, and improving spraying efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
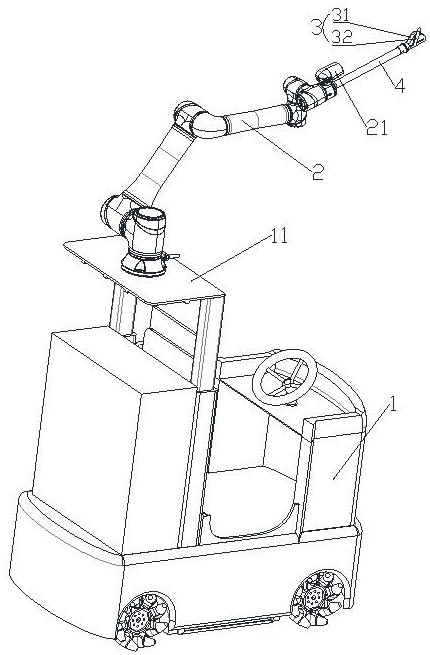
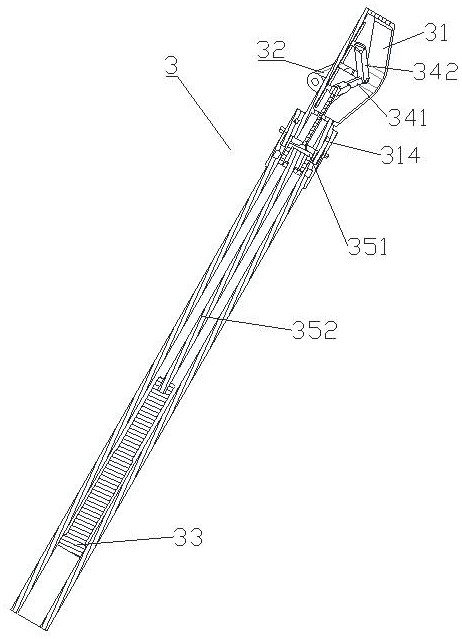
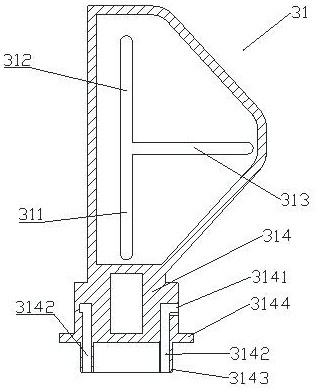
[0062] see Figure 1 to Figure 4 The active mist ion disinfecting robot provided by the embodiment of the present invention, such as figure 1 As shown, it includes: a mobile trolley 1; a robotic arm 2, which is arranged on the mobile trolley 1; a disinfection assembly 3, which is arranged at the end of the robotic arm 2, including a rotating bracket 31, which is rotatably connected to the end of the robotic arm 2 and is rotated around the first axis. Rotating, the nozzle 32 is arranged on the rotating bracket 31, and is arranged on the side of the first axis, and rotates around the second axis, wherein the first axis and the second axis are perpendicular to each other. When the nozzle 32 sprays the sterilizing material, the The recoil force drives the rotating bracket 31 to rotate around the first axis. In the present invention, the nozzle 32 is provided with a rotational speed sensor, which is used to monitor the rotational speed of the nozzle 32 and provide the rotational sp...
Embodiment 2
[0096] The control device 101 of the active mist ion disinfecting robot provided by the embodiment of the present invention includes:
[0097] The disinfection area generation module 102 is used for establishing a reference coordinate system according to the environmental information of the space area, and generating a disinfection area according to the marks calibrated on the reference coordinate system; in this way, the precision of the disinfection area can be realized.
[0098] The preset parameter generation module 103 is used to generate the coordinates of the stop position of the mobile trolley 1 and the spraying trajectory corresponding to the stop position;
[0099] The spraying parameter generation module 104 is used to generate the spraying metering and spraying uniformity level per unit area in the disinfection area;
[0100] Since the active mist ion disinfecting robot is almost fully automatic in the working process, it is necessary to set relevant parameters in ...
Embodiment 3
[0107] The control system of the active mist ion disinfecting robot provided by the embodiment of the present invention, such as Figure 7 As shown, it includes: the main controller 200 and the control device 101 of the active mist ion disinfecting robot, and also includes:
[0108] Positioning and navigating unit 201, the positioning and navigating unit 201 is used to obtain the position coordinates of the mobile trolley 1;
[0109] The nozzle rotation speed control unit 202, the nozzle rotation speed control unit 202 is used for the rotation speed of the nozzle 32, and feedback to the control device 101;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com