Impact point deviation calculation method based on photoelectric reconnaissance equipment of unmanned helicopter
A technology of unmanned helicopters and photoelectric reconnaissance, which is applied in navigation calculation tools, navigation through speed/acceleration measurement, navigation, etc., can solve the problems of unguaranteed calculation accuracy and unguaranteed calculation accuracy, and achieve simple application and convenient operation , the effect of high calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0023] Example 1. The calculation method of impact point deviation based on unmanned helicopter photoelectric reconnaissance equipment includes the following steps:
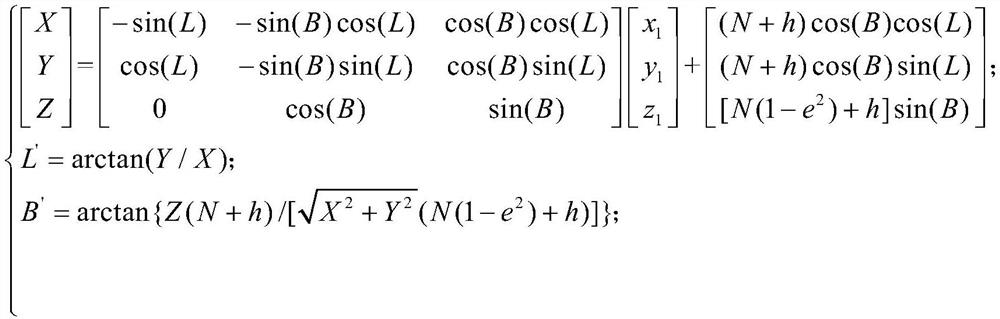
[0024] The first step, initialization; the coordinates of the target in the geodetic Cartesian coordinate system (X a , Y a ,Z a ) and the coordinates of the impact point in the geocentric coordinate system (X b , Y b ,Z b ) is set to 0;
[0025] The second step is to judge whether the laser illuminator is performing ranging, if so, wait, if so, proceed to the third step;
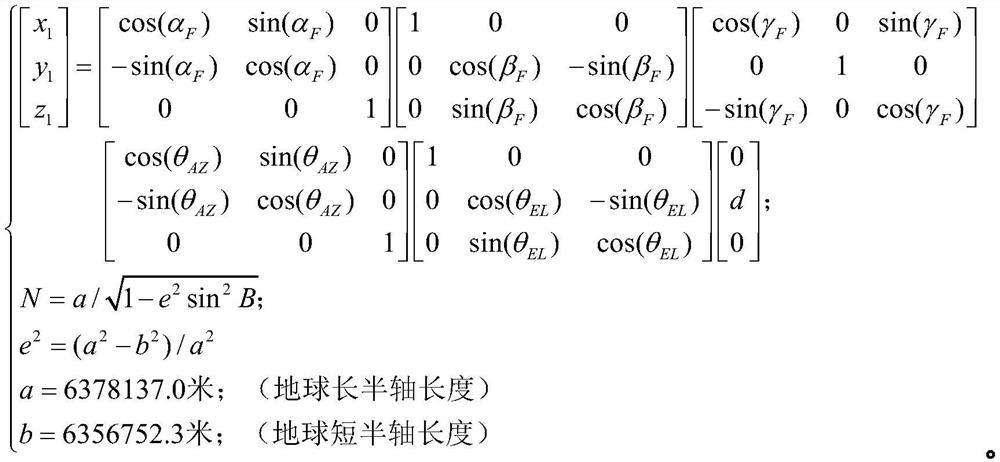
[0026] The third step is to collect the real-time data set (d,α of the laser illuminator at the current ranging point) F ,β F , γ F ,L,B,h,θ AZ ,θ EL ); where d is the slant distance value of the current ranging point output by the laser illuminator relative to the optoelectronic device, α F is the aircraft heading angle output by the inertial navigation system, β F The aircraft pitch angle output for the inertial navigation syste...
Embodiment 2
[0039]Example 2. The preferred embodiment of the present invention is used for photoelectric reconnaissance equipment on unmanned helicopters, and the photoelectric equipment includes visible light TV, infrared thermal imager, laser light meter, video tracker, photoelectric management computer, and servo system.
[0040] Visible light TV and infrared thermal imager are used to image the target, and the laser light meter is used to measure the slant distance value of the target relative to the optoelectronic device. The servo system collects the current azimuth and pitch angle of the optoelectronic device and transmits it to the optoelectronic management computer in real time.
[0041] The photoelectric management computer is the information processing center of the photoelectric detection equipment, receives the data sent by each unit in real time, and calculates the impact point deviation through the method proposed by the present invention.
[0042] When performing the task,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com