Long-endurance amphibious unmanned aerial vehicle and attitude control method thereof
A drone and long-endurance technology, applied in three-dimensional position/channel control, control/adjustment system, non-electric variable control, etc., can solve the problems of adding drones, low work efficiency, and limited power, and achieve broaden The effect of application, long standby time, and small power loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
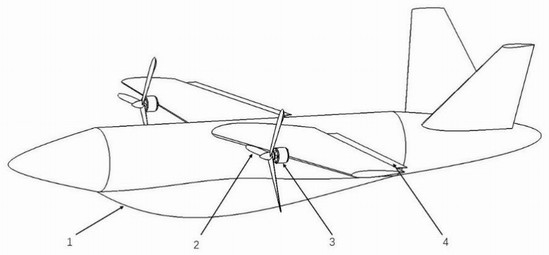
As shown in the accompanying drawings, the embodiment is a long-endurance amphibious unmanned aerial vehicle, and the unmanned aerial vehicle comprises a fuselage, a power system, and a control system; wherein,
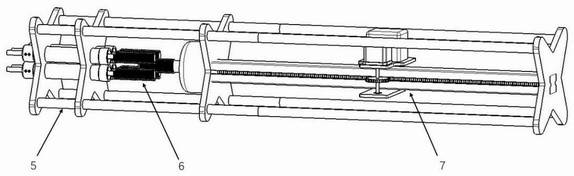
The control system includes a fixed frame, the fixed frame runs through the entire interior of the fuselage, and a buoyancy adjustment device and a center of gravity adjustment device are installed in the fixed frame to control the balance of the drone;
The power system includes a propeller and a pulling motor to provide power output for the drone.
[0019] Further, the buoyancy adjustment device includes a plurality of buoys, a second stepper motor, a threaded piston rod and a worm, the buoys are placed side by side, and the buoyant controls the volume of the buoy cavity by inhaling and discharging water; the threaded piston rod One end is sealed with the buoy, and the other end is distributed with threads. The worm is connected to the output shaft of the second stepp...
Embodiment 2
Based on the above-mentioned long-endurance amphibious unmanned aerial vehicle, the present application also provides an attitude control method thereof, and the attitude control method includes two modes:
In the flight mode, in the flight mode, the position of the center of gravity of the aircraft is changed by adjusting the front and rear movement of the counterweight to realize the pitching motion; the drone includes at least two pulling motors, which are supplied with unequal currents through the power supply The pull motor is driven to achieve differential control, which further drives the rotation of the blades on both sides to generate unequal pulling force. This unequal pulling force will form a moment that deflects around the span of the wing, and the additional pull generated by the increase in the pulling force of the pulling motor The anti-torque is offset by controlling the ailerons to deflect upward or downward to generate a rolling moment, thereby realizing the y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com