Intelligent industrial mechanical arm driving system based on ROS system
A technology of industrial machinery and drive system, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that the robot cannot optimize data instructions in time, the efficiency of the manipulator is low, and the sensitivity of the manipulator is poor, so as to ensure the effect of noise reduction, The effect of flexible opening and closing, quick agility and smooth and accurate control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
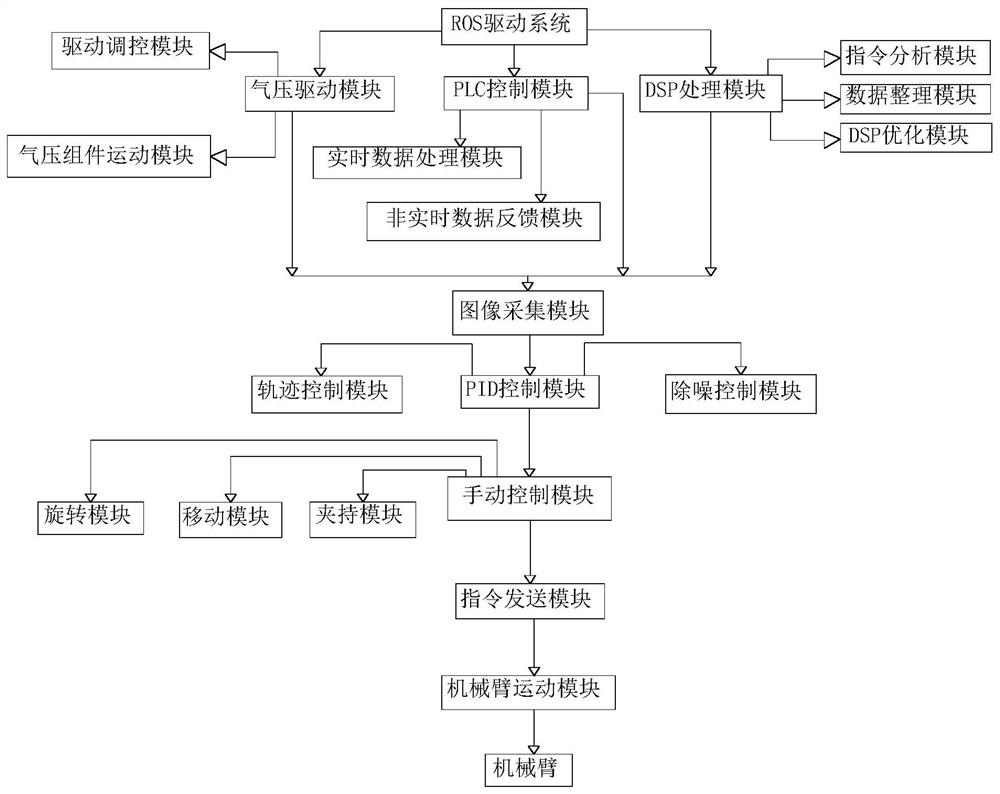
[0031] see figure 1 The present invention provides a technical solution: an intelligent industrial manipulator drive system based on a ROS system, comprising a ROS drive system. The ROS drive system is respectively connected with an air pressure drive module, a PLC control module and a DSP processing module. The drive control module and the air pressure component movement module are connected, and the cylinder, air valve, air tank and air compressor in the air pressure drive module can be adjusted reasonably through the mutual adjustment of the drive control module and the air pressure component movement module. By driving the regulation module, the pressure value of the cylinder and the displacement of the air valve can be effectively controlled, thereby ensuring the high efficiency of the air pressure component movement module in controlling the movement of each component.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com