


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Multi-target intelligent network connection vehicle collaborative optimization control method
A target vehicle and control method technology, applied in the field of collaborative optimization control of multi-objective intelligent networked vehicles, can solve problems such as non-optimal solutions, less optimization research, and limited signal control, so as to avoid traffic accidents and shorten Calculation of time, the effect of reducing vehicle delays
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
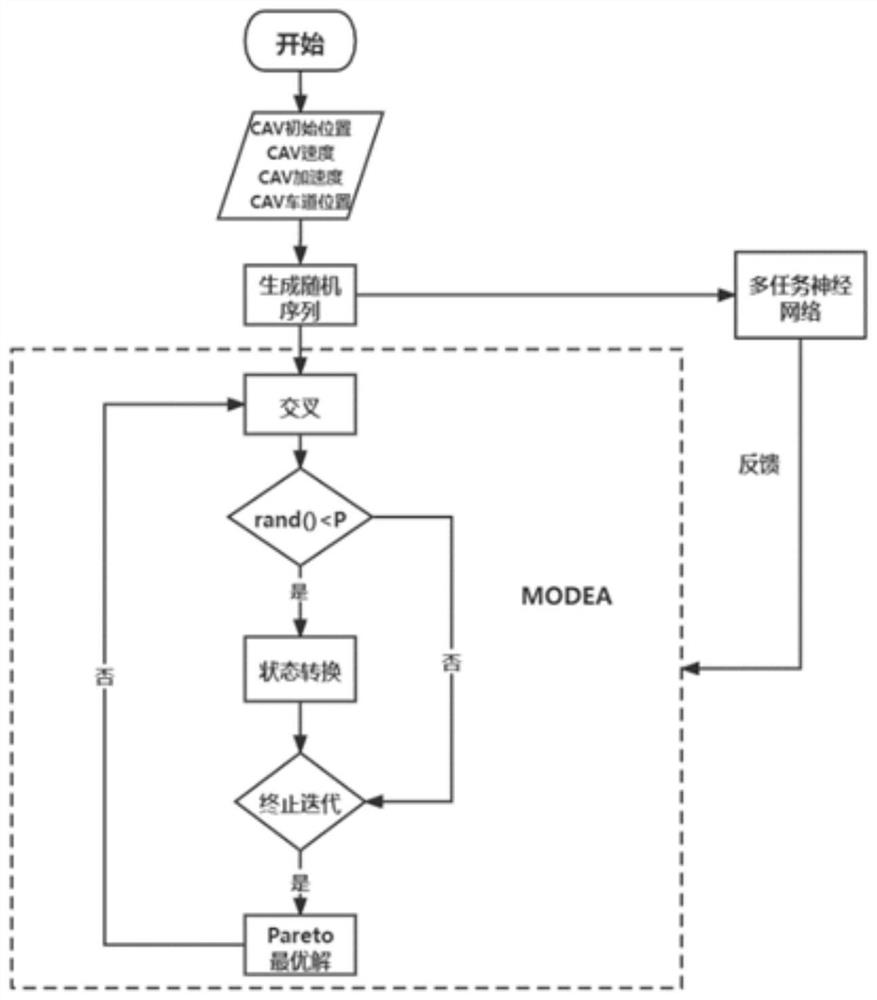
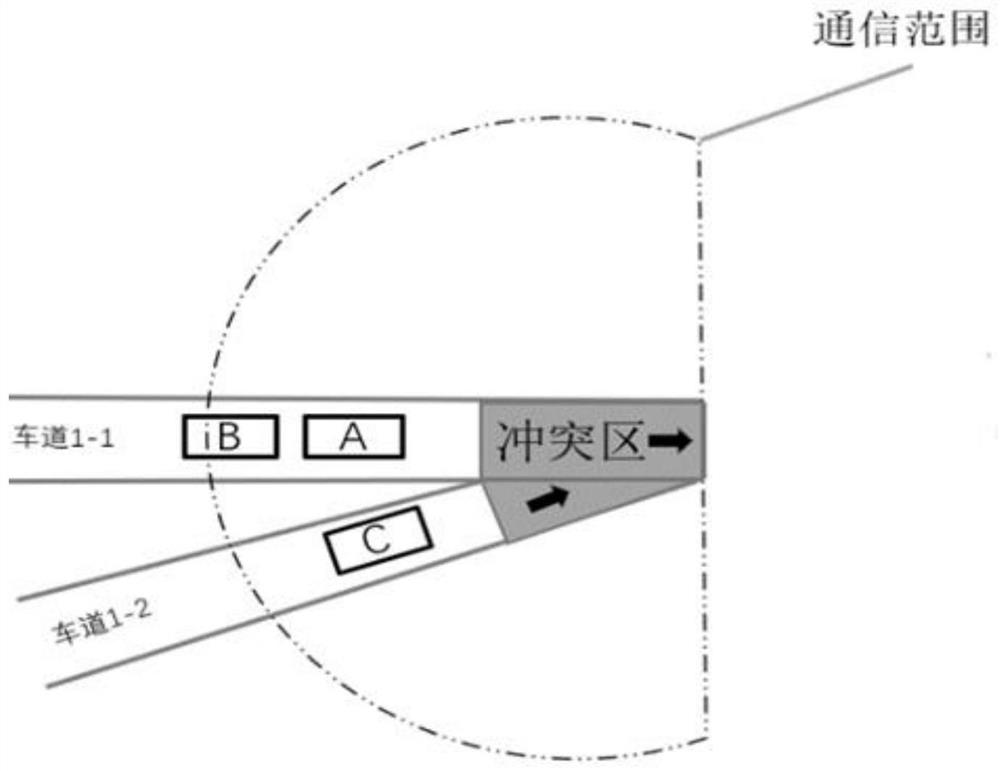
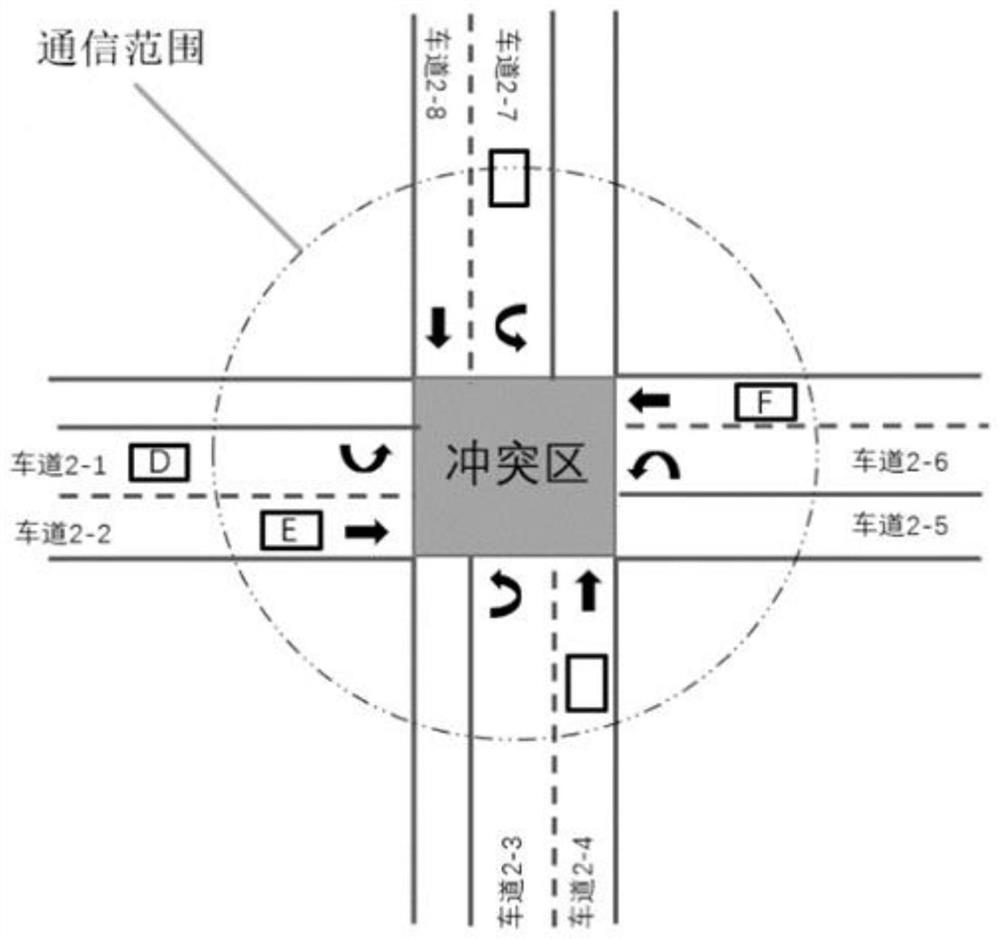
[0059] Combining Figure 2 to Figure 4 , based on the process described in step A to step D, implement the following steps:
[0060] According to the process described in step A, the traffic data information of each target vehicle corresponding to the preset communication range at the entrance is collected, and based on the traffic data information corresponding to each target vehicle, all vehicles are mapped to a road by using virtual mapping. Constraints on speed limit and acceleration capability, establish a model that guides ICVs to pass through intersections without conflict, simulate the control process of ICVs to judge whether there is potential conflict between vehicles, and ICVs proceed according to the predetermined traffic sequence Car-following, obtain the car-following sequence of the target vehicle through the target intersection, and use the method of virtual vehicle mapping to ensure driving safety. Take the case of the highway on-ramp as an example, as shown ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com