Track planning method of redundant space mechanical arm for on-track catching
A technology for space manipulators and trajectory planning, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as the inability to use space manipulators and the difficulty in applying aerospace tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0105] Embodiment 1 is mainly used to verify the effectiveness of the algorithm for roughly capturing segments.
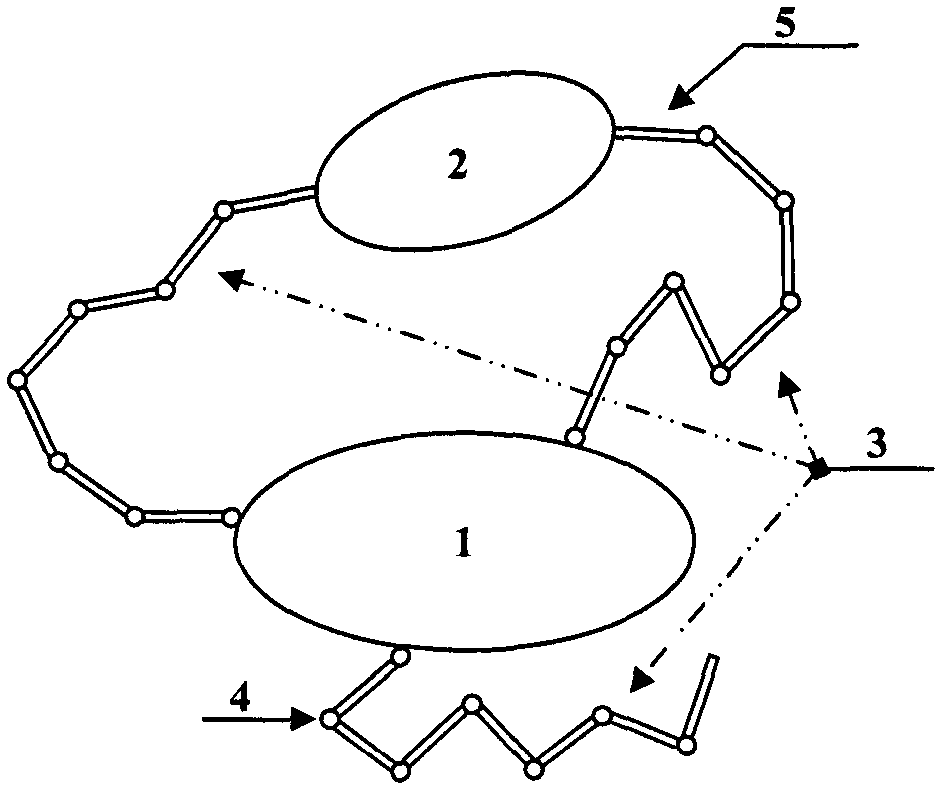
[0106] (1) A 7-DOF mechanical arm is designed. The geometric parameters of the manipulator are shown in Table 1. The installation point of the first section of the arm is represented in the base coordinate system. The initial configuration when each joint angle is 0 and the positive direction of each corner Figure 4 , The black line in the figure represents the robotic arm, the black circles represent the joints connecting each segment of the robotic arm, and the arrows next to the joints indicate the positive direction of the rotation angle of each joint. At this time, the base coordinate system coincides with the body coordinate system of each arm, see Figure 4 The coordinate system in oxyz. Figure 4 Among them, 6 is the base mounting point of the robotic arm, and 7 is the end effector of the robotic arm, that is, the seventh section arm. The following uses the ...
Embodiment 2
[0117] Example 2 gives the control method of the entire capture process of the redundant space manipulator.
[0118] (1) Install the robotic arm in Example 1 on a space operation platform to capture a non-cooperative target. Firstly, the capture task requirements and sensor measurement are used to determine the capture point on the non-cooperative target, and calculate the position and posture of the end effector required to capture the target.
[0119] (2) Divide the entire capture process into a rough capture segment and a fine capture segment. The initial state of the rough capture segment is the current configuration of the robotic arm, and the end state of the rough capture segment is set as the end effector of the robotic arm is located at a certain distance (for example, 20 cm) above the capture point.
[0120] (3) From the position and posture of the end effector at the end of the rough capture stage set in the previous step, the collision-free target configuration algorithm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com