Unmanned road roller operation path planning method and system based on rasterization
A path planning and unmanned driving technology, which is applied in control/regulation systems, motor vehicles, two-dimensional position/channel control, etc., can solve problems such as failure to take compaction quality into account, and achieve compaction quality, The effect of avoiding underpressure and improving the compaction level
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The technical solution of the present invention will be explained in detail below in conjunction with the accompanying drawings and embodiments.
[0036] A grid-based unmanned road roller operation path planning method, comprising the following steps:
[0037] Step 1: Carry out rasterization processing on the pavement plane of the construction layer, and divide the pavement plane into matrix form with n sides whose length is w n square grid array.
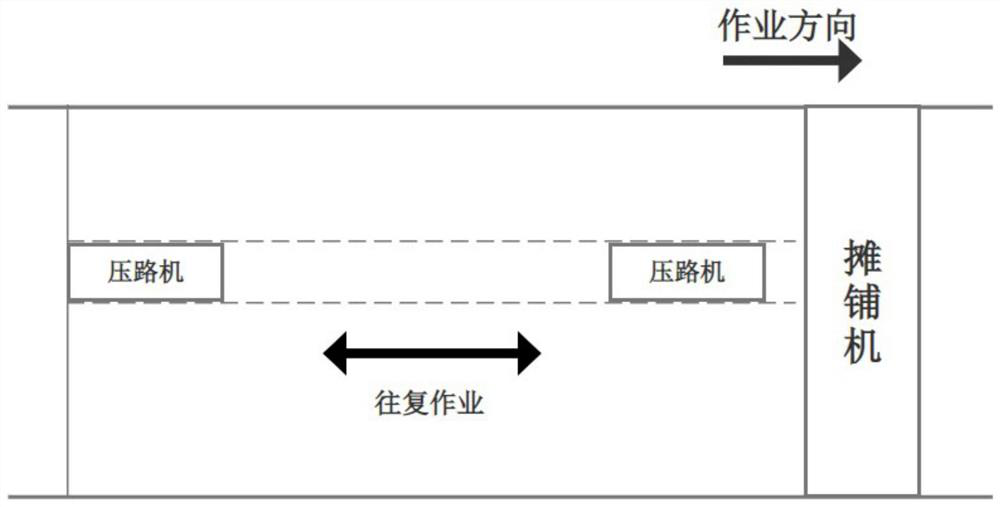
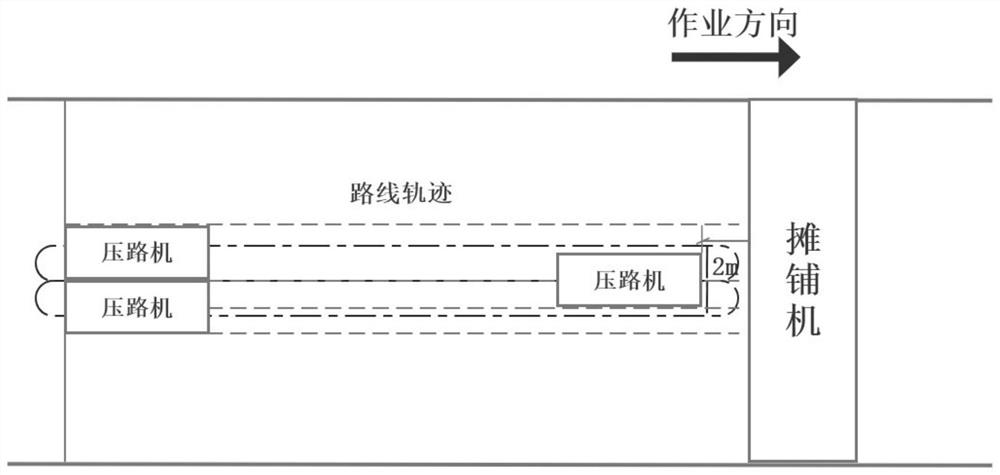
[0038] Step 2: Design the dynamic circulation route of the unmanned roller according to the road width of the construction layer, the operating width of the roller and the number of rollers.
[0039] Specifically, the working width of the road roller is taken as the path width of the circulation route, and the length of the unfinished compaction within the paving mileage of the paver is taken as the path length of the circulation route. The present embodiment provides following 4 kinds of circulation routes:
[0040] Line...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com