Manned person/unmanned aerial vehicle co-fusion cluster formation control method based on cluster space framework
A space frame and control method technology, applied in three-dimensional position/channel control, vehicle position/route/height control, control/adjustment system, etc., can solve the problems affecting the normal performance of decision-making, high workload, and the inability to truly play the role of the operator questions of wisdom and experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The effectiveness of the design method proposed by the present invention is verified through a specific example of manned / unmanned aerial vehicle fusion cluster formation in an obstacle environment. The six-degree-of-freedom manned-machine model selected in this example is the F-16 aircraft model. The experimental computer configuration is Intel Core processor, 3.60Ghz main frequency, 32.0GB memory, and the software is MATLAB 2021 version.
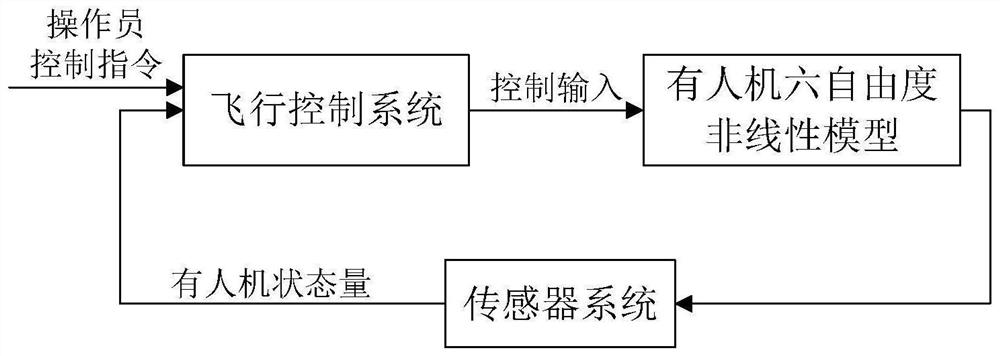
[0083] Step 1: Build a six-degree-of-freedom nonlinear F-16 man-machine simulation model
[0084] The inherent parameters of the F-16 aircraft are set as follows: the variation range of the component of the air velocity V on the horizontal plane is 56-408m / s, the maximum value of the height h should be less than 15,239m, and the moment of inertia around the x-axis, y-axis and z-axis (I x ,I y ,I z ) = (12874.8, 75673.6, 85552.1) kg m 2 , product of inertia I xz =1331.4kg·m 2 .
[0085] The F-16 manned-machine control input co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com