Time synchronization method and system based on multi-sensor fusion positioning
A technology of multi-sensor fusion and time synchronization, which is applied in directions such as navigation through speed/acceleration measurement, can solve problems such as multi-sensor input time asynchrony, achieve the effect of improving fusion positioning accuracy and avoiding uncertain time delays
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
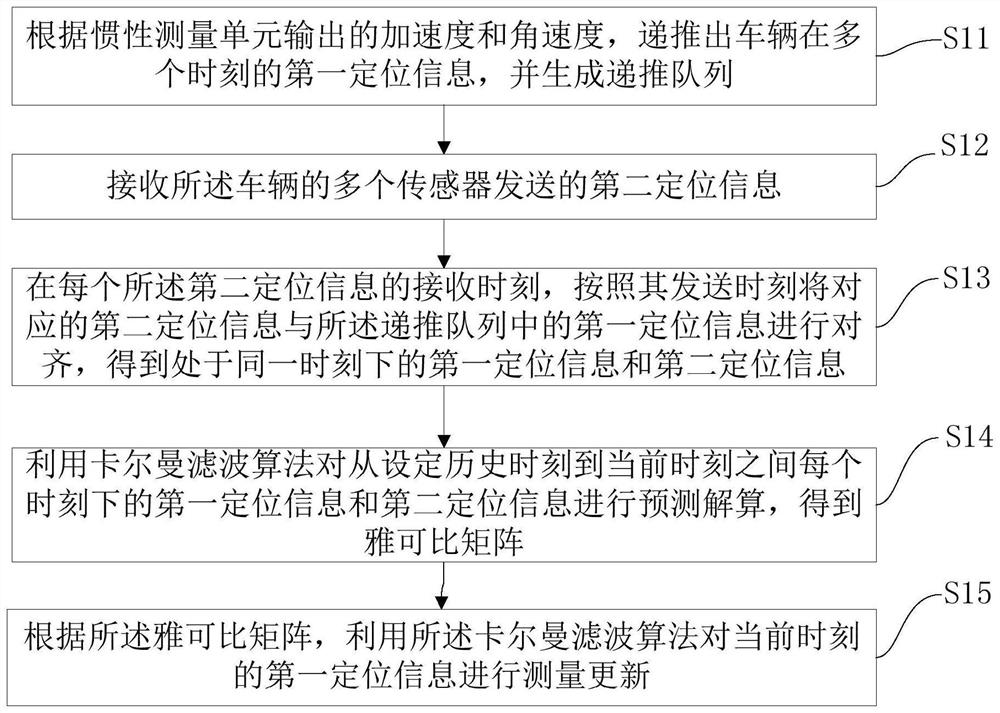
[0046] see figure 1 , an embodiment of the present invention provides a time synchronization method based on multi-sensor fusion positioning, including:
[0047] S11: According to the acceleration and angular velocity output by the inertial measurement unit, recursively obtain the first positioning information of the vehicle at multiple moments, and generate a recursive queue;
[0048] Further, according to the acceleration and angular velocity output by the inertial measurement unit, deriving the first positioning information of the vehicle at multiple moments, and generating a recursive queue, including:
[0049]Taking the first positioning information at the set historical moment as the initial value, using the acceleration and angular velocity output by the inertial measurement unit to perform integral calculations to obtain the first positioning information at several consecutive moments;
[0050] The first positioning information obtained by integration is sorted in chr...
Embodiment 2
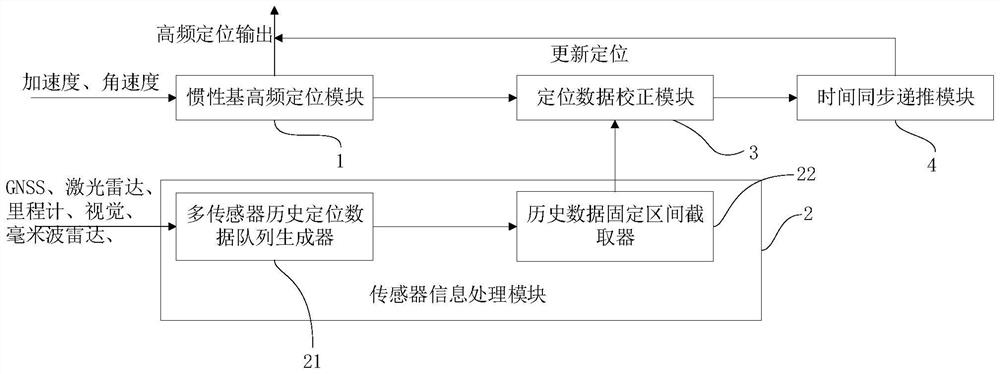
[0095] see image 3 , the embodiment of the present invention provides a time synchronization system based on multi-sensor fusion positioning, including:
[0096] The inertial-based high-frequency positioning module 1 is used to deduce the first positioning information of the vehicle at multiple moments according to the acceleration and angular velocity output by the inertial measurement unit, and generate a recursive queue;
[0097] A sensor information processing module 2, configured to receive second positioning information sent by multiple sensors of the vehicle;
[0098] The positioning data correction module 3 is configured to align the corresponding second positioning information with the first positioning information in the recursive queue according to the sending time at each receiving moment of the second positioning information, so as to obtain The first positioning information and the second positioning information at the moment;
[0099] The positioning data cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com