Intelligent posture control system for lifting rotary lifting appliance
A technology of rotating spreader and attitude control, applied in the direction of load hanging components, transportation and packaging, can solve the problem of inability to eliminate the impact, and achieve the effects of simple and convenient maintenance, stable and reliable composition, and high detection accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
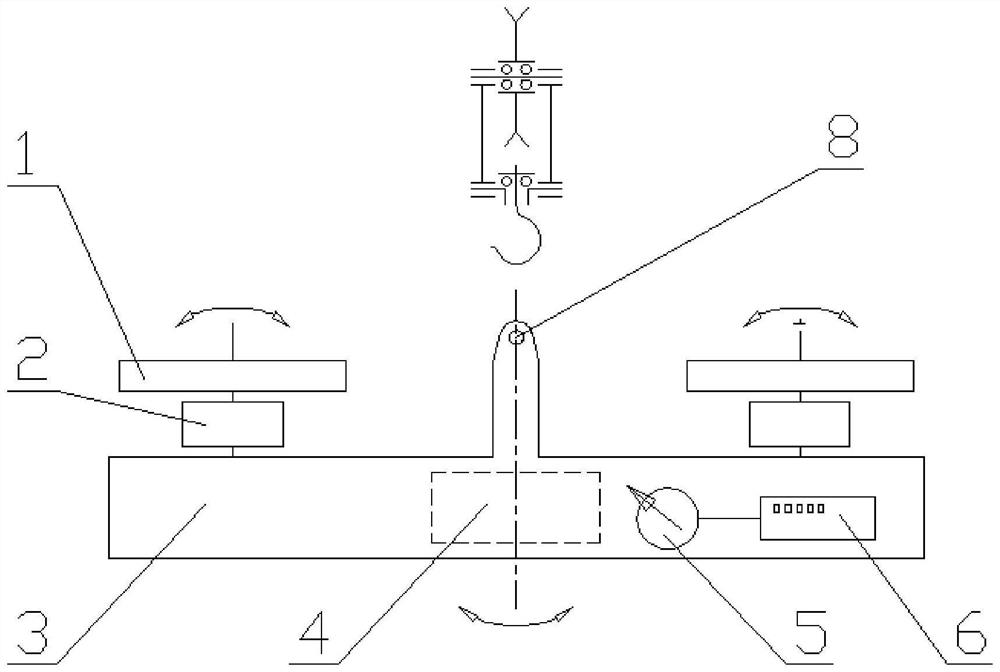
[0033] Such as figure 1 As shown, the present invention provides a smart gesture control system for a rehearsal rotating dish, including:
[0034] The kinetic energy unit provides kinetic energy to rotate the jack;
[0035] Hanging beam 3 for connecting the lifting point and the lift;
[0036] Power 4, preset to provide stable electrical energy for the system within the hanging beam;
[0037] Electronic compass 5, provided on the hanging beam for real-time monitoring angle data;
[0038] The solver and the controller 6 are connected to the electronic compass; the rotation angle data monitored by the electronic compass gives the movable portion specifically movement data;
[0039] The electronic compass 5 monitors the posture data of the hanging beam 3 in real time, and feeds back to the solver and the controller 6 to complete the closed loop control.
[0040] As an embodiment of the present application, the energy portion in the present embodiment is an inertial flywheel 1 and a d...
Embodiment 2
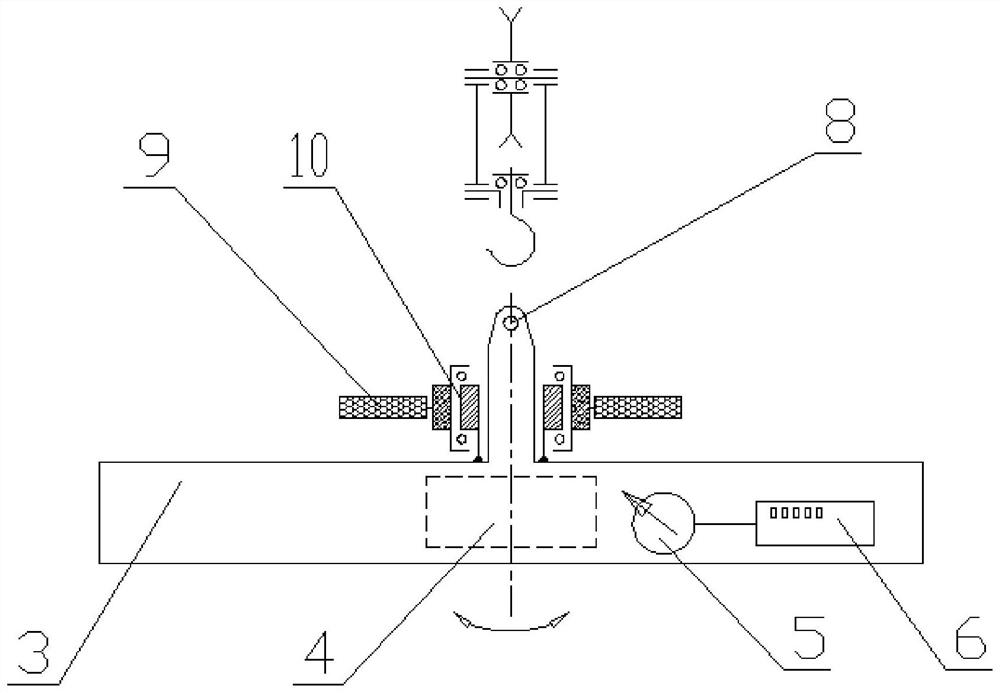
[0043] Such as figure 2 As shown, on the basis of the first example, the kinetic energy portion of the present embodiment includes: the inertial flywheel 1 and the drive motor 2 provided with the hanging beam integrated. In this case, the same portion as in the present embodiment is not described in this embodiment, and only the content distinguished from the first embodiment.
[0044]In this embodiment, the driving motor 2 is rotated by the inertial flywheel 1, and the hanging beam 3 is directly connected to the hook by the hook connection of the hanging point 8, and rotates through the thrust bearing in the hook, and realizes the multi-motor drive; electronic compass real-time monitoring The rotation angle of the hanging beam, the solver and the controller control the motion parameters of the drive motor based on the monitoring data of the electronic compass.
Embodiment 3
[0046] Difference to Embodiment One and Example II The present embodiment uses a single inertial flywheel drive. In this case, the same portion as in the present embodiment is not described in this embodiment, and only the content distinguished from the first embodiment.
[0047] Such as image 3 As shown, the kinetic energy unit includes: the rotor 10 of the flywheel 9 and the motor is fixed; the hanging beam 3 is directly connected to the hook through the hook connection of the hook, and the switch center of the motor is concentric with the swivel center of the electric machine. motor driven. The inner ring of the rotor of the motor is integral with the hanging beam 3.
[0048] The above-described embodiments of the present invention are merely description, and does not represent the advantages and disadvantages of the embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com