Bionic rigid-flexible coupling variable-rigidity continuum robot and control method
A rigid-flexible coupling, continuum technology, applied in the intersection of computer science, control science, robotics, and sensing technology, it can solve the problems of slow response speed, inconvenient control, small change stiffness, etc. , compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
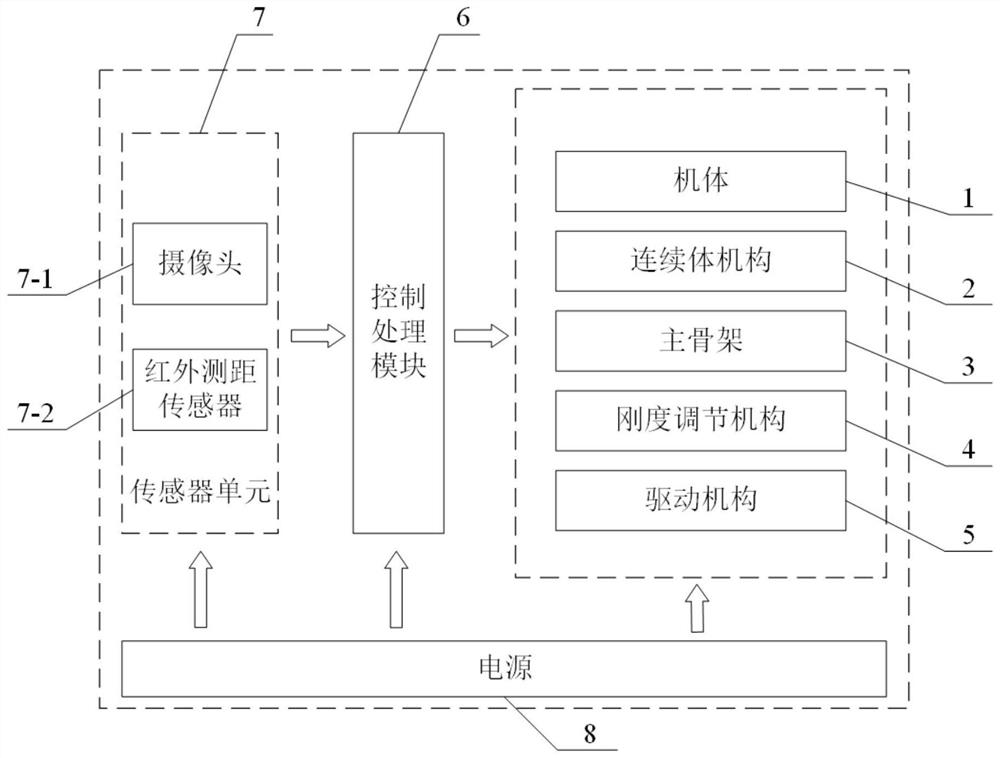
[0040] Example: refer to figure 1 , a continuum robot with bionic rigid-flexible coupling and variable stiffness is composed of a body 1, a continuum mechanism 2, a main skeleton 3, a stiffness adjustment mechanism 4, a drive mechanism 5, a control processing module 6, a sensor unit 7, and a power supply 8. The body 1 is used to install, fix and support the above-mentioned mechanisms, units and modules, the continuum mechanism 2 realizes the bending and winding function of the robot, the main skeleton 3 passes through the center of the continuum mechanism 2 as a skeleton, and the stiffness adjustment mechanism 4 realizes the rigidity of the robot Adjustment function, the driving mechanism 5 realizes the control of the continuum mechanism 2, the main frame 3 and the stiffness adjustment mechanism 4, the control processing module 6 realizes the driving of the driving mechanism 5, and the sensor data processing and storage of the sensor unit 7, and the sensor unit 7 realizes the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com