Unmanned aerial vehicle ship-borne take-off and landing semi-physical simulation system based on physical domain model
A semi-physical simulation and unmanned aerial vehicle technology, applied in the field of system simulation, can solve the problems of not being a ship, reducing the simulation effect of ship-borne unmanned aerial vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
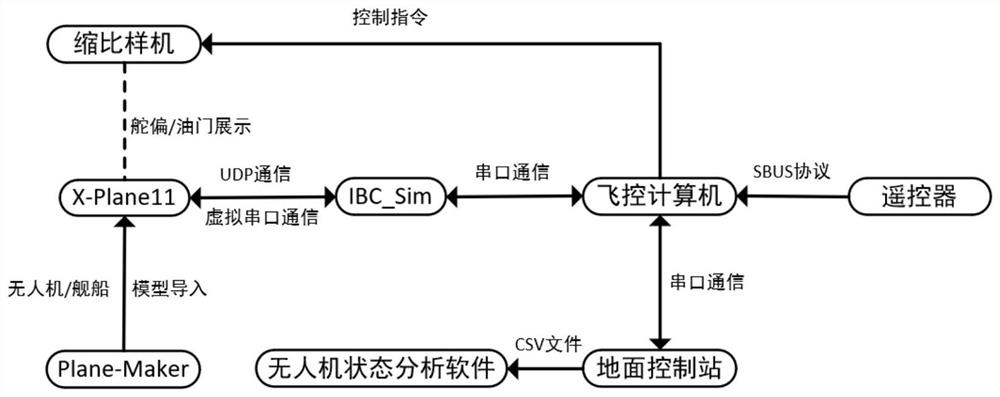
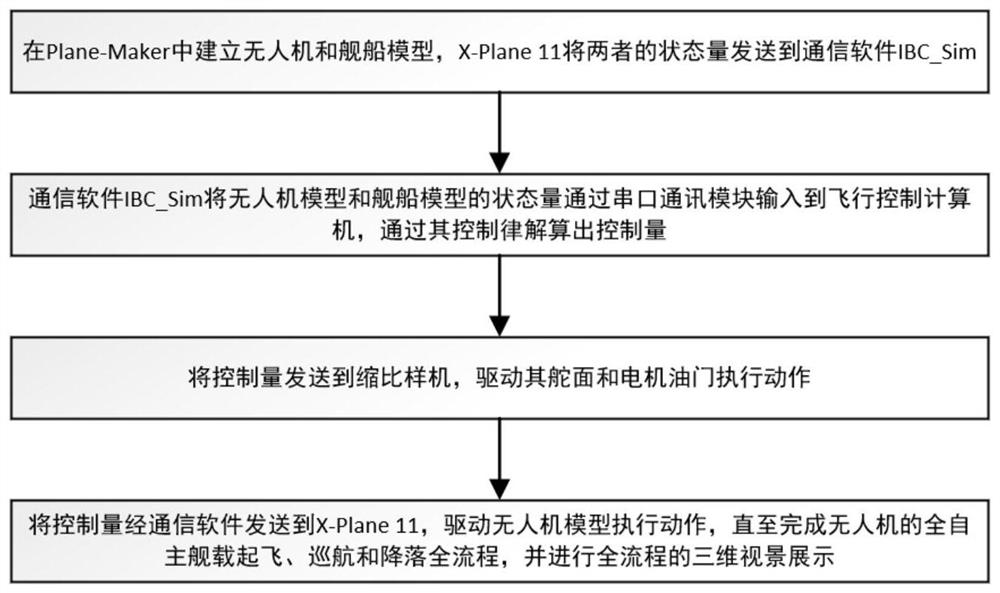
[0054] Through the research on the semi-physical simulation system of the ship-borne UAV, the present invention designs a semi-physical simulation system for the unmanned aerial vehicle's take-off and landing based on the physical domain model, and based on the mature S60N flight control computer and ground control software of the research group, The real-time communication mechanism of ship model, ship-borne UAV model and ship-machine simulation has been established. Through the visual software X-Plane 11 and the ground control software UAV_GCS50 running on the same PC at the same time, the flight control computer can obtain the relative position, speed, heading and attitude of the shipboard UAV model and the ship model in real time. Information, so as to carry out more precise control of UAV flight, and realize the half-physical simulation o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com