Airborne SAR image control-point-free real-time positioning method suitable for complex terrain
A no-control point, real-time positioning technology, applied in image analysis, image data processing, geographic information database, etc., to achieve the effect of avoiding calculation failure, reducing positioning error, and avoiding the impact of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
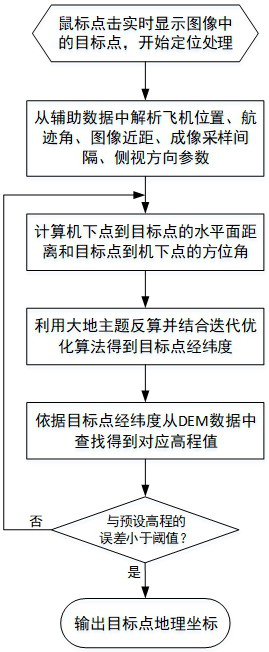
[0028] According to one embodiment of the present invention, a method for real-time positioning of airborne SAR images without control points adapted to complex terrain is proposed, such as figure 1 shown, including the following steps:
[0029] Step 1. Calculate the memory address corresponding to the target center through the mouse click position, and obtain the SAR auxiliary data corresponding to the target through the memory address;
[0030] Step 2, analyzing the aircraft position, imaging track angle, image close range, image sampling interval, and side-view direction parameters from the SAR auxiliary data; the aircraft position includes longitude, latitude, and height;
[0031] Step 3. Calculate the distance from ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com