Dynamic calibration method for roadside sensor, and medium
A dynamic calibration and sensor technology, applied in the field of sensor calibration, can solve the problems of a single sensor, time-consuming, cumbersome labeling process, etc., and achieve the effect of reducing systematic errors, coherent data collection, and ensuring accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in further detail below in conjunction with the accompanying drawings.
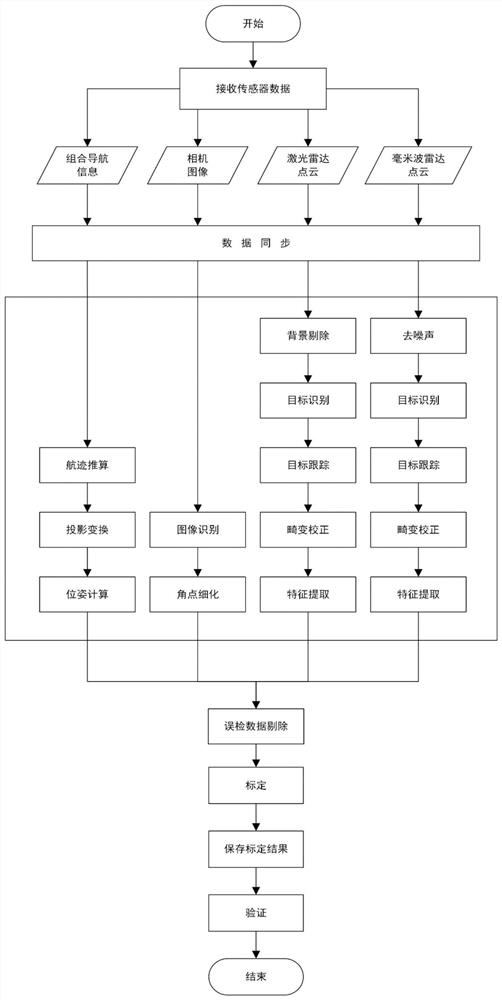
[0015] According to one or more embodiments, a method for dynamic calibration of roadside sensors is disclosed, such as figure 1 mentioned, including the following steps:
[0016] S1. Receive the raw data collected by each sensor, including camera image data obtained through the camera, the laser radar point cloud obtained through the laser radar, the millimeter wave radar point cloud obtained through the 4D millimeter wave radar collection, and the integrated navigation. Combined navigation information.
[0017] Among them, the integrated navigation needs to be installed on the calibration target and fixedly connected with the calibration target. For data collection by cameras, lidars, and 4D millimeter-wave radars, it is necessary to calibrate the target and collect data when the positioning signal is judged to be good according to the set standards and m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com