Fire fighting truck path planning method and system, terminal and storage medium
A technology for path planning and fire trucks, applied in control/regulation systems, vehicle position/route/height control, motor vehicles, etc., can solve the problem that the environment model cannot quickly search and reach the target point, the effect of dynamic obstacle avoidance planning is poor, and the environment model Uncertainty and other problems, to achieve the effect of reducing the loss of people's lives and property, improving the efficiency of fire fighting and speeding up the path planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
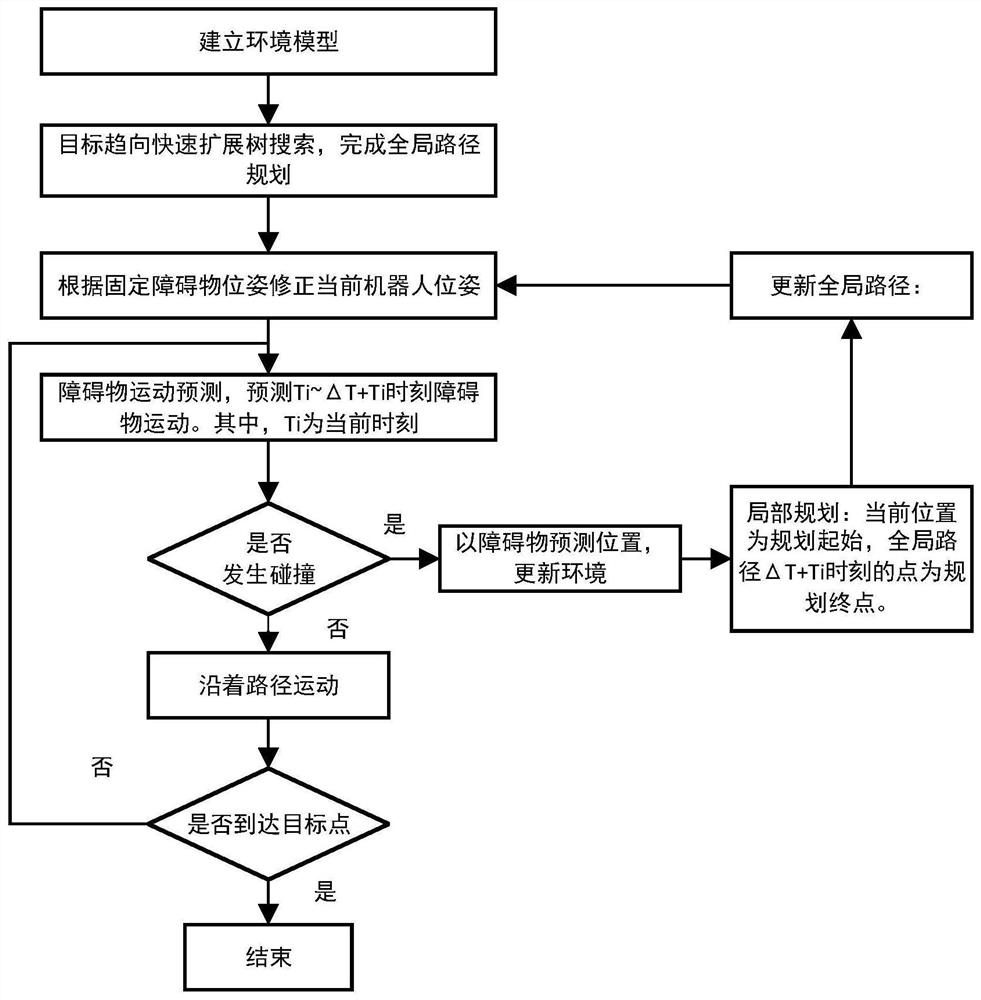
[0057] An embodiment of the present invention provides a fire truck path planning method, including:
[0058] Obtaining an environment model, which includes the pose of the fixed obstacle relative to the fire garage in the world coordinate system;
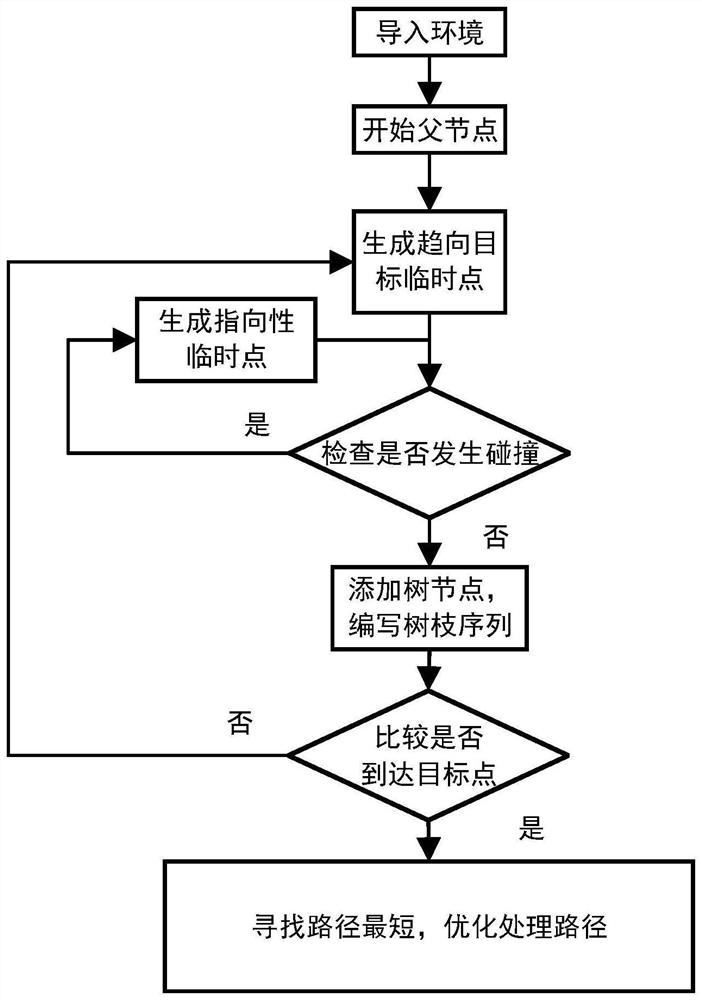
[0059] Obtaining search boundary information and obstacle information based on the environment model, and using the target trend to quickly expand the tree search to obtain the global path;
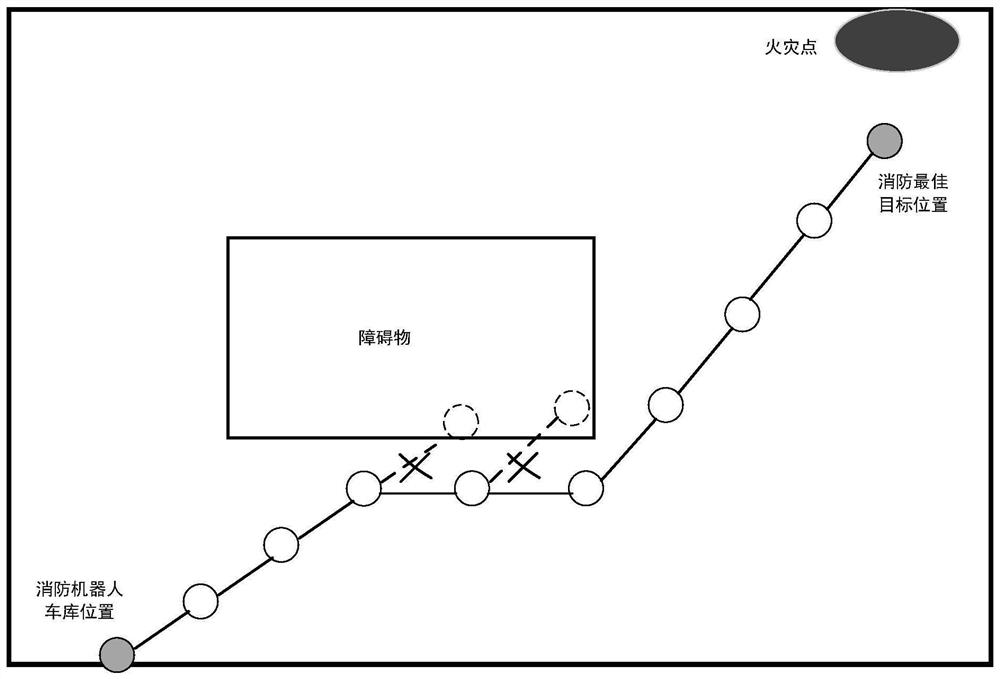
[0060] Based on the global path, sending a control signal to the fire truck, so that the fire truck moves from the fire garage to the target point along the global path;
[0061] Receive the fixed obstacle information fed back during the fire truck's walking process, and correct the current pose of the fire truck based on the received fixed obstacle pose;
[0062] Receive the dynamic obstacle information fed back during the walking process of the fire truck, predict the obstacle movement and collision based on the received dynamic obstacle, a...
Embodiment 2
[0103] An embodiment of the present invention provides a fire truck path planning system, including:
[0104] The obtaining module is used to obtain the environment model, and the environment model includes the pose of the fixed obstacle relative to the fire garage in the world coordinate system;
[0105] The global path planning module is used to obtain the search boundary information and obstacle information based on the environment model, and adopt the target trend to quickly expand the tree search to obtain the global path;
[0106] A sending module, configured to send a control signal to the fire truck based on the global path, so that the fire truck moves from the fire garage to the target point along the global path;
[0107] The correction module is used to receive the fixed obstacle information fed back during the walking process of the fire truck, and correct the current pose of the fire truck based on the received fixed obstacle pose;
[0108] The local path planni...
Embodiment 3
[0111] An embodiment of the present invention provides a fire truck route planning terminal, including a processor and a memory coupled to the processor;
[0112] The memory stores program instructions for implementing the fire truck path planning method described in any one of Embodiment 1;
[0113] The processor is used to execute the program instructions stored in the memory to control the path planning of the fire truck and process the sensing information.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com