Automatic driving trajectory generation system in high-speed scene
A technology of automatic driving and trajectory generation, applied in the field of unmanned vehicles, to achieve the effect of improving path planning speed, high safety and operability, and ensuring real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
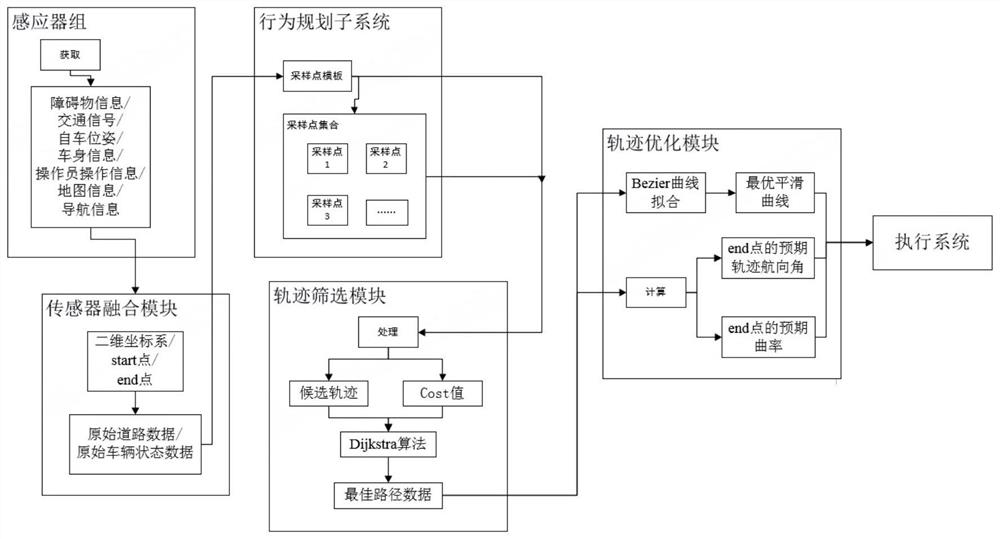
[0051] like figure 1 As shown in the figure, the automatic driving trajectory generation system in the high-speed scene includes a sensor group and an execution system for obtaining vehicle motion information and road information, and also includes a behavior planning subsystem, a trajectory screening module, and a trajectory optimization module;
[0052] The sensor group collects obstacle information, traffic signals, vehicle pose, body information, operator operation information, map information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com