A device for repairing nets in deep-water cages
A technology of deep-water cages and nets, applied in the field of marine fishery, can solve the problems of unsustainable development, low quality of repairing nets, complicated production procedures, etc., to avoid economic losses and biological environmental pollution, and to be highly portable. , the effect of high portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
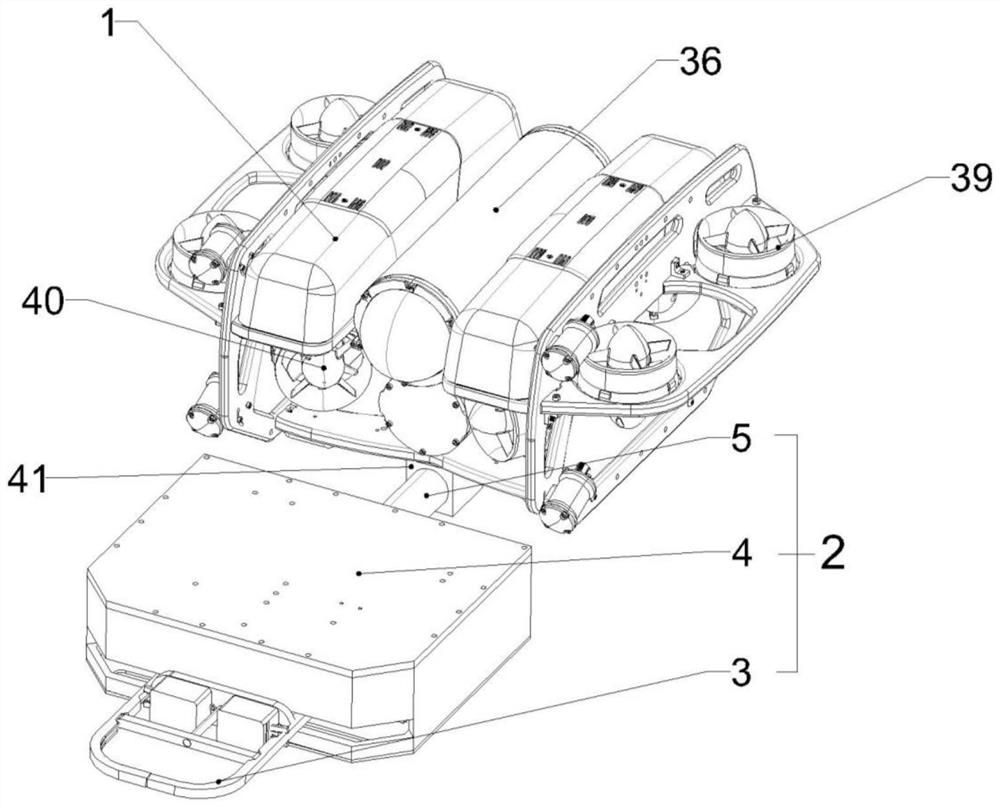
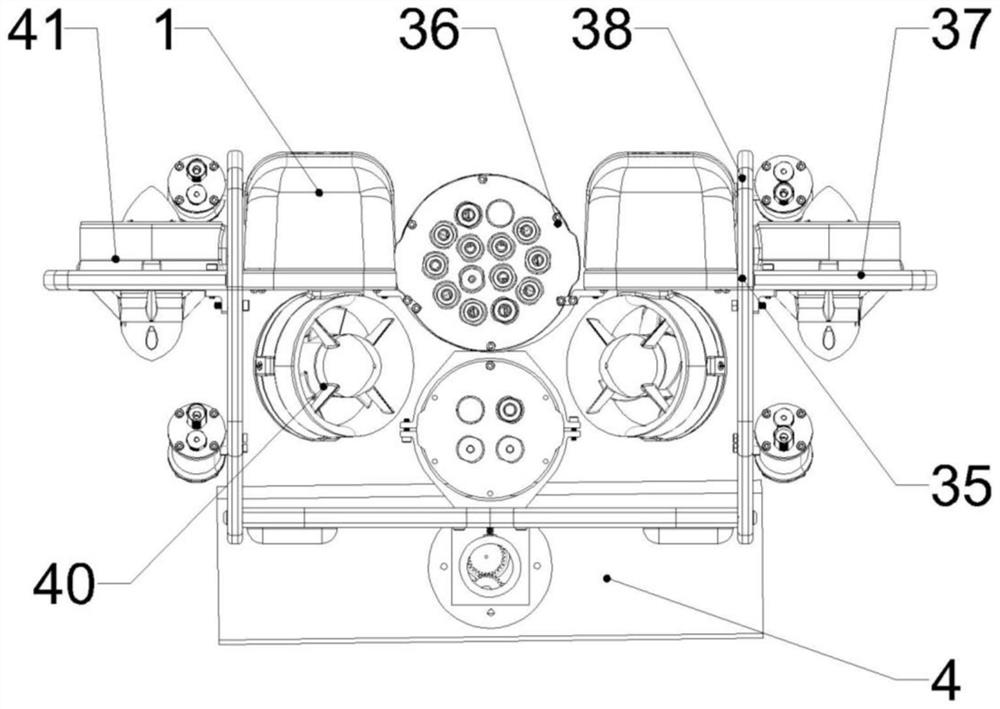
[0039] refer to Figure 1-12 , the present invention provides a device for repairing nets in deep water net cages, comprising an open-frame underwater robot 1 and a net repair mechanism 2 for deep water nets, and the repair mechanism 2 for deep water nets nets includes a hole penetration mechanism for nets , wire feeding mechanism, rotary knotting mechanism, wire cutting mechanism and wire clamping mechanism;
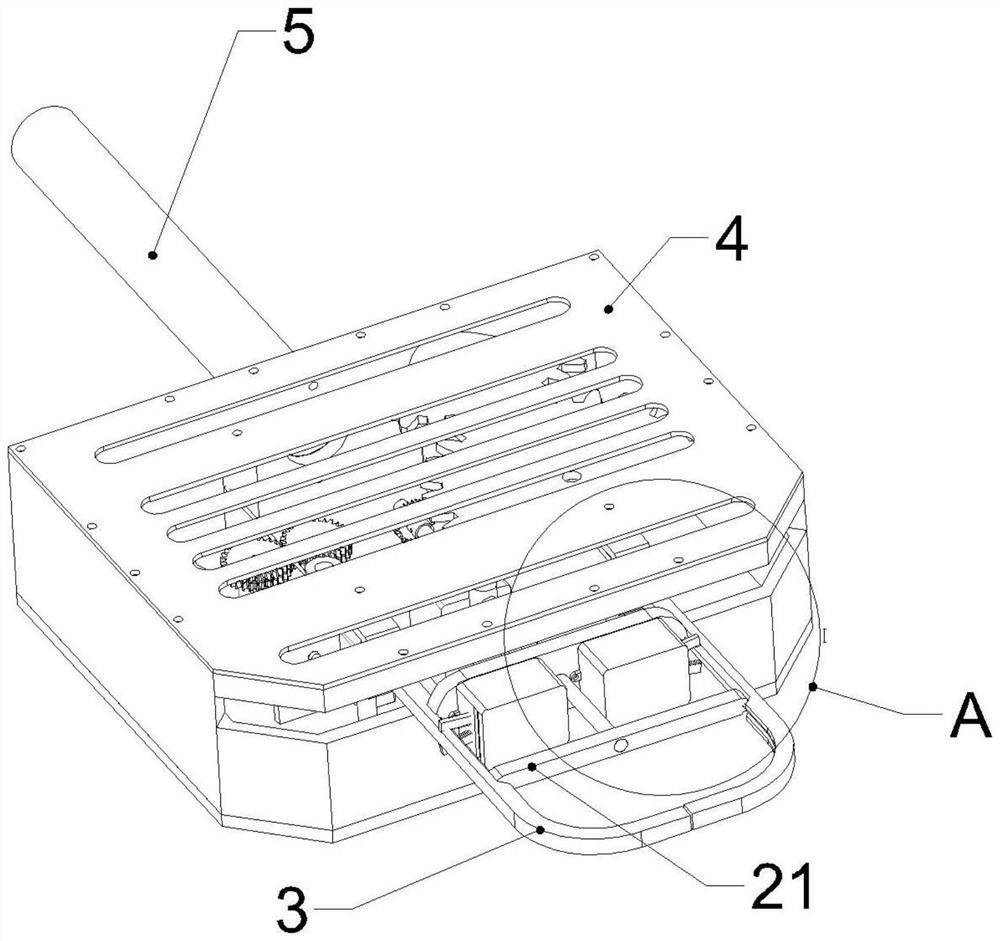
[0040] The hole penetration mechanism includes the mechanical claw 3 and the control box 4 that controls the mechanical claw 3. The wire feeding mechanism and the steel wire cutting mechanism are fixed inside the control box 4. Between claws 3;
[0041] Through the mutual cooperation of the open-frame underwater robot 1 and the deep-water netting repair mechanism 2, the netting of the netting in the deep water with holes can be effectively repaired, and the open-frame underwater robot 1 can be well Overcoming the complex environment of the seabed and reducing the risk...
Embodiment 2
[0050] Embodiment 2: The embodiment provides a device for repairing net clothing in deep-water cages. The difference between this embodiment and Embodiment 1 is that the open-frame underwater robot 1 is movably connected with the net clothing in deep-water cages; It can slide inside the connecting block 41 and can also rotate inside the connecting block 41. At this time, the open-frame underwater robot 1 only plays the role of diving and transporting the deep-water cage net clothing repair mechanism 2 and the overall dynamic stability of the device when starting up. The various motion modes required by the mechanical claw 3 during repair are realized by sliding and rotating the connecting rod phase inside the connecting block 41, which can not only effectively reduce the movement of the open-frame underwater robot, but also reduce the consumption of electric energy. , effectively extend the working time of the repairing device; it can also speed up the repairing process, reduce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com