Driving assembly, active exoskeleton motion module and active exoskeleton robot
A technology of driving components and motion modules, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as cumbersome assembly, wearing, high learning costs for users, and large overall size of equipment, and achieve simple structure and flexible configuration. , Use flexible and convenient effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with various embodiments, but it should be noted that these embodiments are not limitations of the present invention, and those of ordinary skill in the art can make functional, method, or structural equivalent transformations or replacements based on these embodiments. , all fall within the protection scope of the present invention.
[0030] An embodiment of the present invention provides an exoskeleton robot, which includes: an upper limb mechanism, a lower limb mechanism, and an active exoskeleton movement module installed on the upper limb mechanism and the lower limb mechanism. The upper limb mechanism and the lower limb mechanism can be worn on the limbs of the human body, and the active exoskeleton movement module is the power when the limb mechanism is assisted.
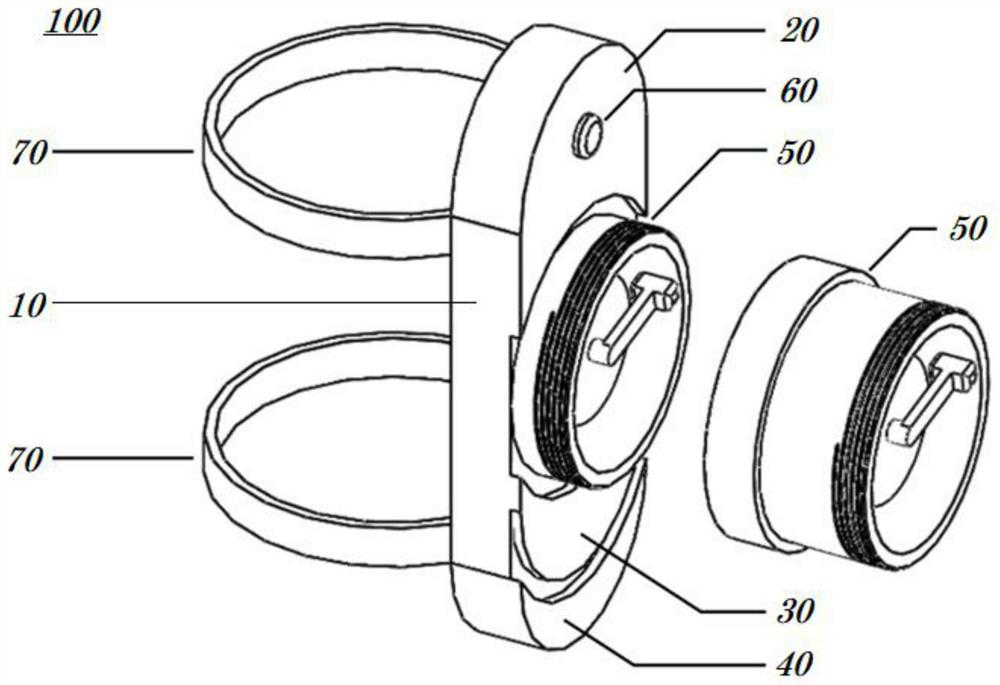
[0031] Such as figure 1 As shown, the active exoskeleton movement module 100 includes: a main body 10 , a battery 20 , a main con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com