Intelligent warehouse logistics robot path planning method based on L-shaped path trend improved A-STAR algorithm
A logistics robot and path planning technology, which is applied in the direction of instruments, motor vehicles, and two-dimensional position/channel control, etc., can solve the problems of mobile robots with many broken lines, large cumulative turning angles, and many turning times, so as to reduce the number of turning times , short running time, and the effect of reducing the turning angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the purpose, technical solutions and advantages of the embodiments of the present application clearer, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application.
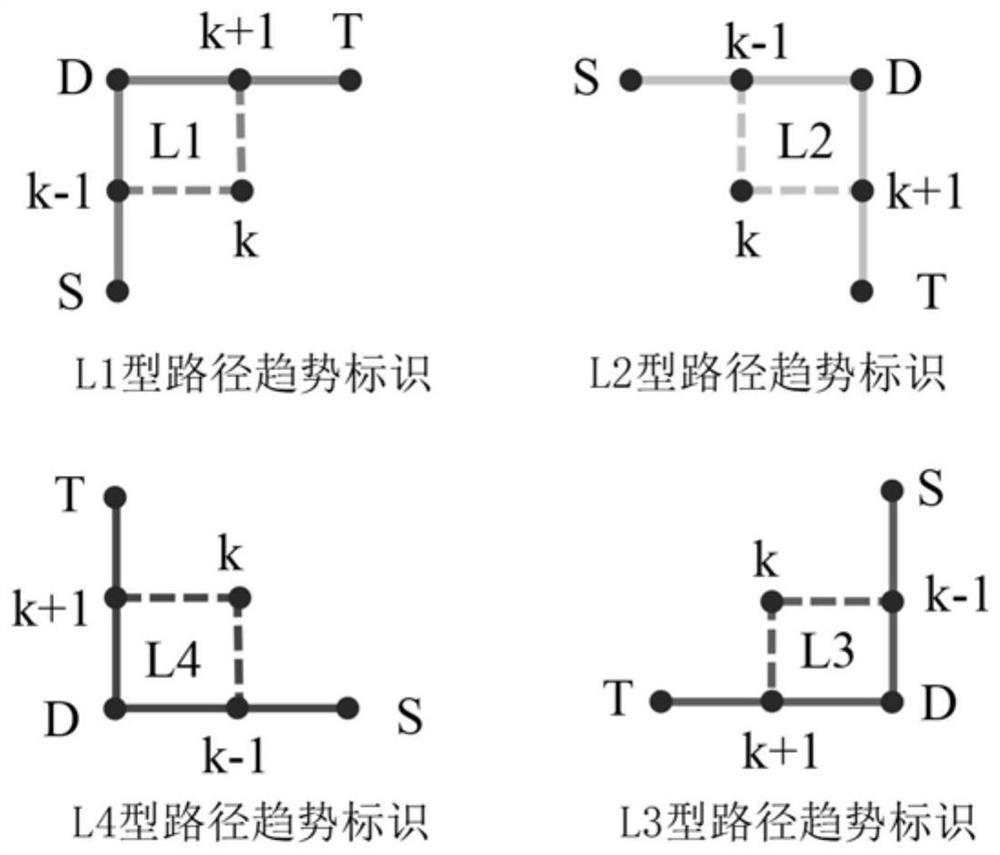
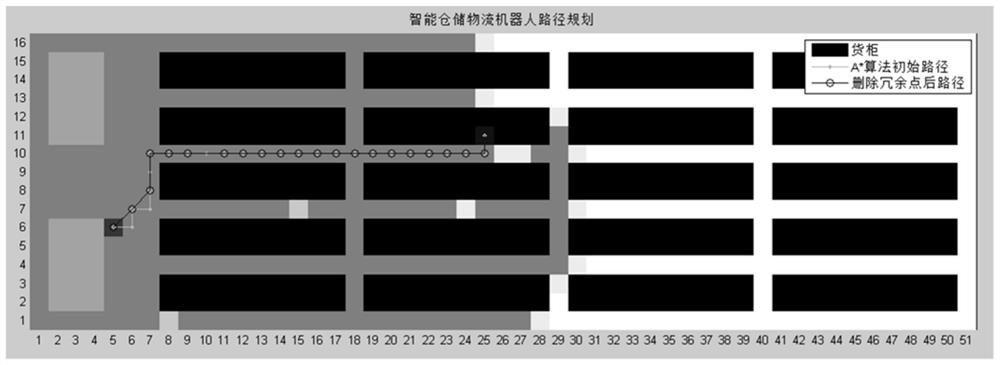
[0026] The path of the mobile robot planned by the A-STAR algorithm in the prior art has problems such as many broken lines, many turning times, and a large cumulative turning angle. The intelligent warehousing environment is very different from the general robot working environment. In the warehousing environment, the feasible space of the logistics robot is limited, and the shape of the obstacle is regular. Therefore, the path planning of the logistics robot in the intelligent warehousing environment is different from that of the general mobile robot.
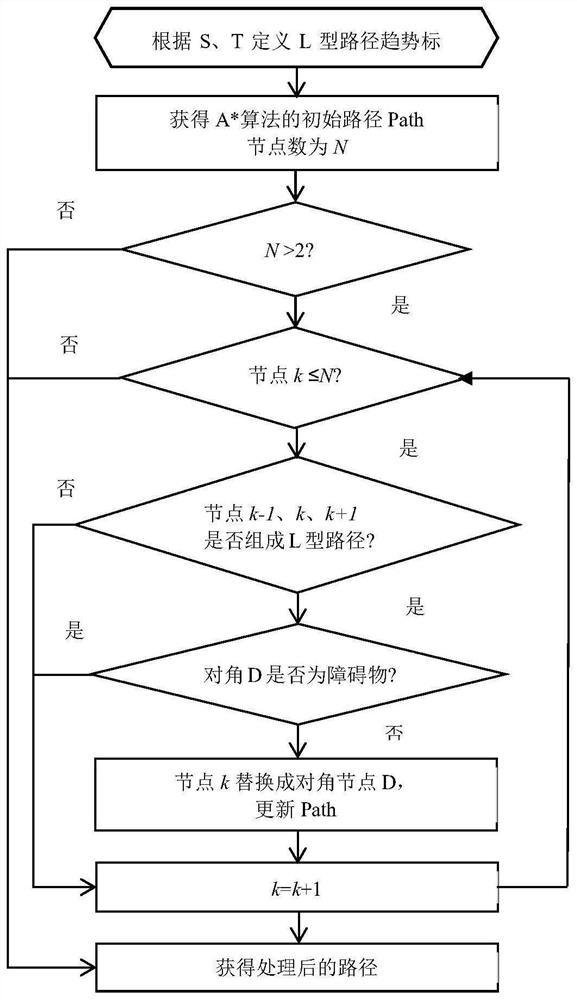
[0027] Such as Figure 1 to Figure 4 As shown in one of the present invention, the present invention di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com