SCARA intelligent mechanical arm control method and system for building construction
A technology for building construction and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low flexibility in task execution and wear and tear of manipulator arms, and achieve the goals of shortening execution time, increasing service life, and improving execution efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
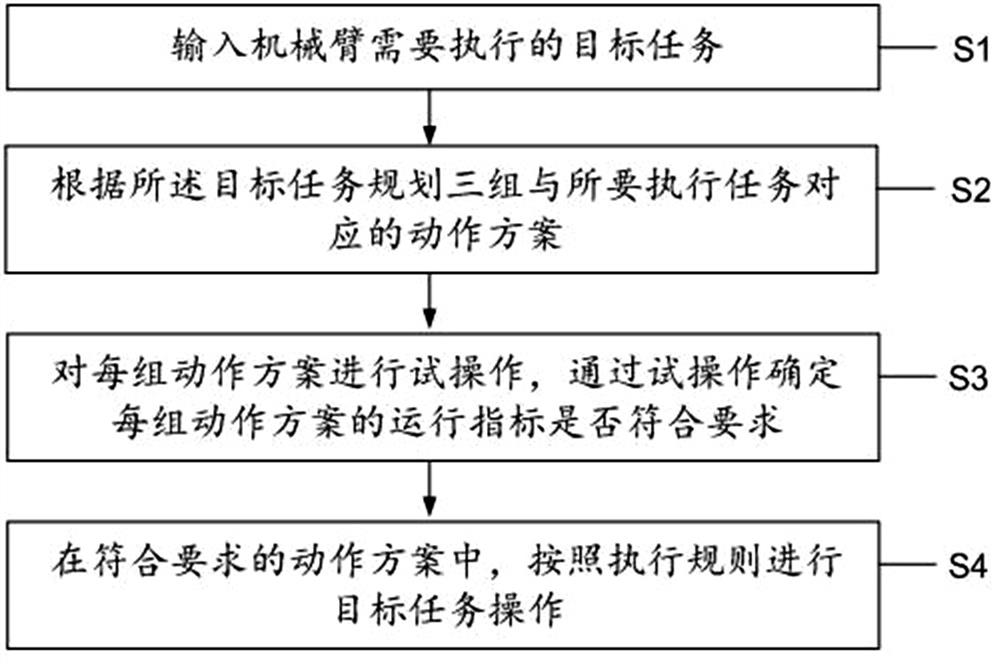
[0073] A kind of SCARA intelligent mechanical arm control method for building construction that the present invention proposes, such as figure 1 As shown, the method includes:
[0074] S1. Input the target task that the robotic arm needs to perform;
[0075] S2. Planning three sets of action plans corresponding to the tasks to be performed according to the target tasks;
[0076] S3. Conduct a trial operation on each group of action plans, and determine whether the operation indicators of each group of action plans meet the requirements through the trial operation;
[0077] S4. In the action plan that meets the requirements, perform the target task operation accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com