Rapid relocation method for large-scale mapping scene based on point cloud
A repositioning and large-scale technology, applied in the field of robot automatic driving, can solve the problems of reducing the speed of repositioning, the robustness is limited by the environment, and the amount of calculation is large, so as to reduce the amount of calculation, improve the lack of pruning, The effect of reducing the search range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Below in conjunction with accompanying drawing, the present invention is further explained:
[0060] Design principle of the present invention
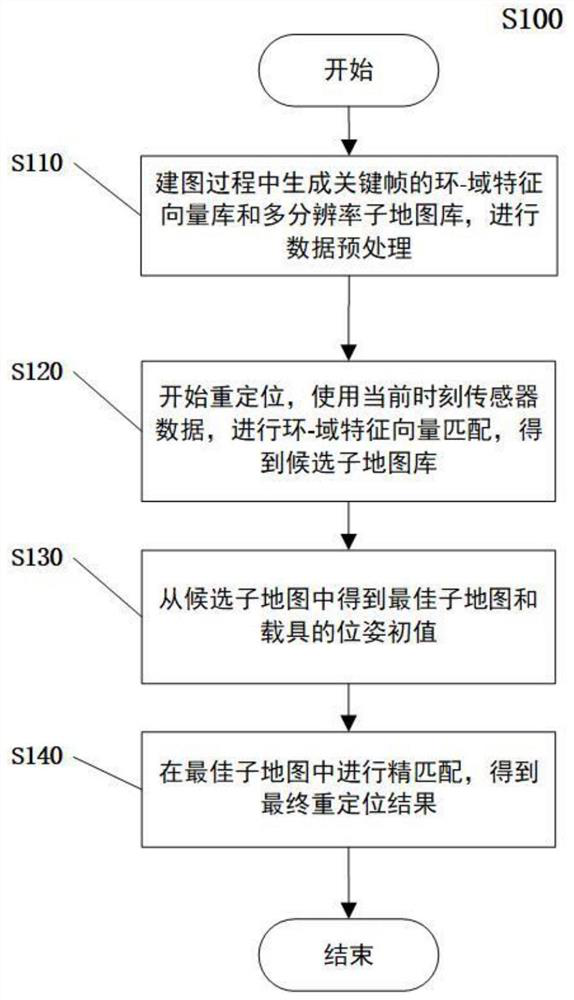
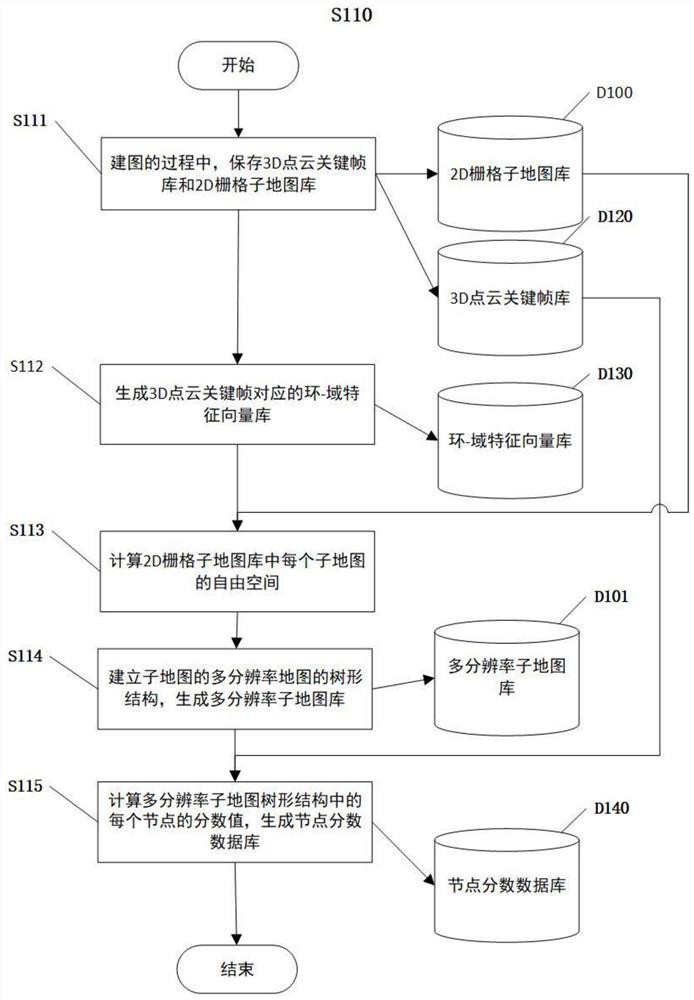
[0061] 1. The design principle of the combination of time-sharing calculation and real-time calculation: the time-sharing calculation is to perform data preprocessing during the map building process to generate a node score database; the real-time calculation is to perform relocation without completely relying on It is based on the historical database, but selectively performs real-time calculation of nodes, including real-time calculation of nodes in the first layer, selective calculation of nodes in the middle layer and the last layer. The conditions for real-time calculation of nodes in the middle layer are: everything and history Nodes that are not matched in the library are pruned, and nodes that have been matched are calculated in real time; the condition for real-time calculation of the last layer node is: if the parent ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com