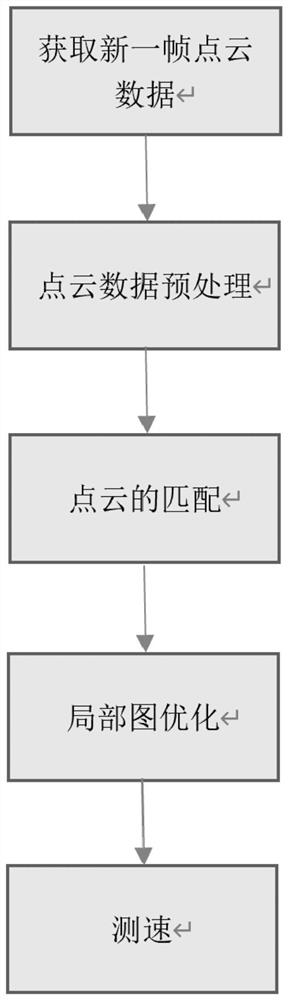
Point cloud speed measurement method based on improved ICP
A point cloud and speed measurement technology, applied in the field of navigation, can solve the problem of large error in the common ICP method, and achieve the effect of reducing the impact and accurate registration results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0092] Embodiment 1: 3D point cloud preprocessing steps
[0093] Suppose k is in the carrier coordinate system L at time k k The following frame of 3D point cloud data collected is in Indicates the i-th point in the point cloud data, Respectively represent the i-th point in the point cloud data in the carrier coordinate system L k the coordinates below;
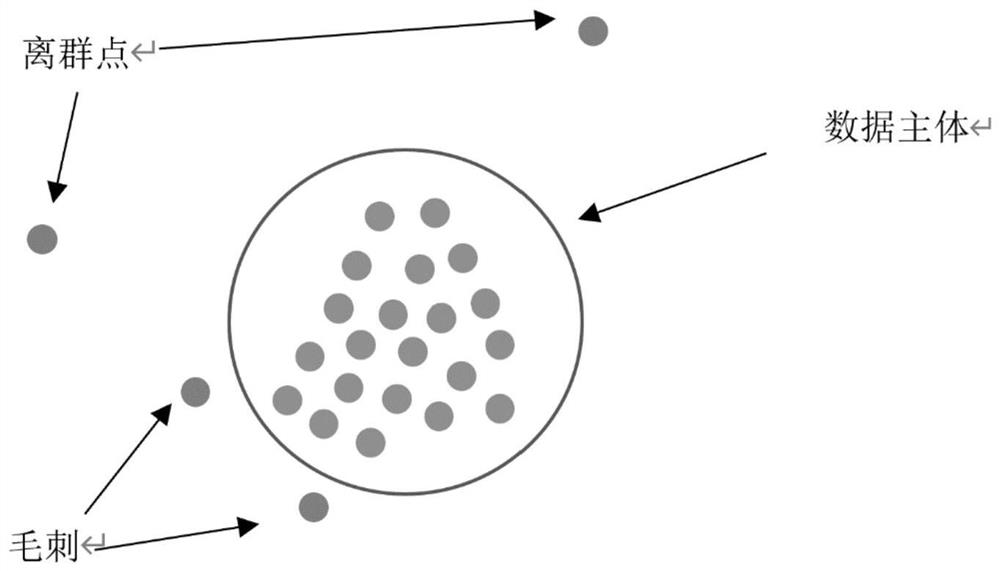
[0094] exist , calculate the nearest m points from each point and the distance from the point to the nearest m points by the kd-tree algorithm;
[0095] for the ith point The nearest m points and points The distance between them is: d i1 , d i2 ,...,d im ;
[0096] Calculate the average d of these m distances i-average , can be called d i-average is the local average distance;
[0097] In the same way, it is also possible to find the point The local average distance d of m neighboring points of i1-average , d i2-average ,...,d im-average . from d i1-average , d i2-average ,...,d im-average Choose ...
Embodiment 2
[0100] Embodiment 2: Matching of 3D point cloud
[0101] Use the odometry or RANSAC method to obtain the vehicle coordinate system L k The initial estimated pose T in the world system W k-start ;
[0102] Let the previous sampling time of the point cloud sampling time k be o;
[0103] The collected point cloud data is recorded as
[0104] The preprocessed point cloud data is recorded as
[0105] The carrier coordinate system corresponding to time o is L o ;
[0106] The pose of the carrier in the world system is T o ;
[0107] Using the improved ICP method to with processing to get the optimized T k-start , denoted as T k .
Embodiment 3
[0108] Embodiment 3: Improved ICP
[0109] Use the odometry or RANSAC method to obtain the vehicle coordinate system L k The initial estimated pose T in the world system W k-start ;
[0110] Let the previous sampling time of the point cloud sampling time k be o;
[0111] The collected point cloud data is recorded as
[0112] The preprocessed point cloud data is recorded as
[0113] The carrier coordinate system corresponding to time o is L o ;
[0114] The pose of the carrier in the world system is T o ;
[0115] Use T k-start and T o Will Transformed to the world coordinate system W, the corresponding point cloud data is expressed as
[0116] from Select points on the plane;
[0117] Use the method of non-maximum suppression to make the selected points evenly distributed;
[0118]The obtained standard point set is denoted as
[0119] exist Search operations in , for any point p in j ,exist Find the distance p in j nearest λ points;
[0120] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com