


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Unmanned ship sea surface target tracking method and device based on multi-sensor fusion
A multi-sensor fusion and target tracking technology, applied in the field of unmanned boat sea surface target tracking based on multi-sensor fusion, can solve the problems of low measurement accuracy, unavailability, and inability to ensure safety, to enhance safety and improve accuracy. , low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
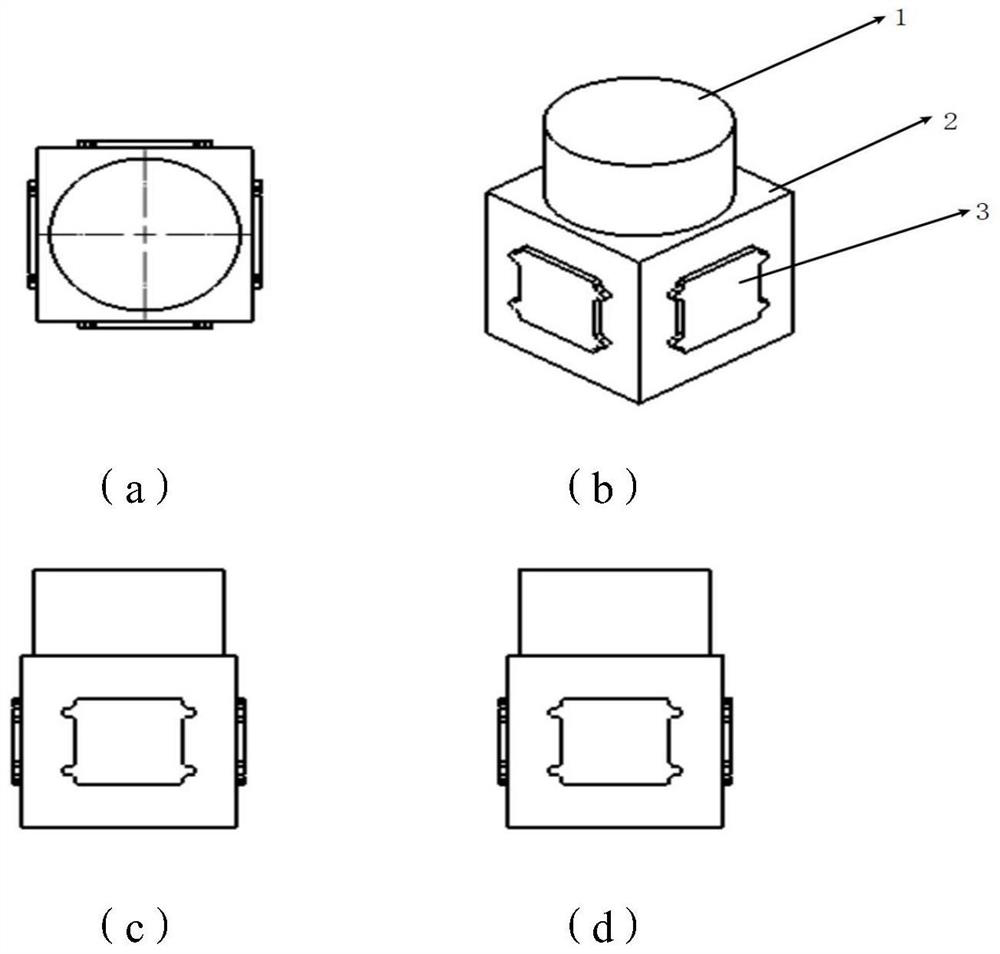
[0058] In order to solve the above problems, this embodiment provides an unmanned surface target tracking method based on the fusion of laser radar and millimeter wave radar, which mainly solves the impact of harsh environments such as rain and fog on the perception results, and builds a sensor installation platform, using four A millimeter-wave radar and a lidar solve the problem of inconsistent horizontal viewing angles of different sensors. The detection information fused by multiple sensors is used as input, and then the detected target is tracked to obtain more accurate target information, so as to achieve stable and accurate detection and tracking of targets around the unmanned vehicle.
[0059] In order to realize the above functions, the technical solution adopted in this embodiment is as follows:
[0060] Step 1: Multi-sensor installation.
[0061] Install one lidar and four millimeter-wave radars in a fixed position, and set up network communication so that the shor...
Embodiment 2
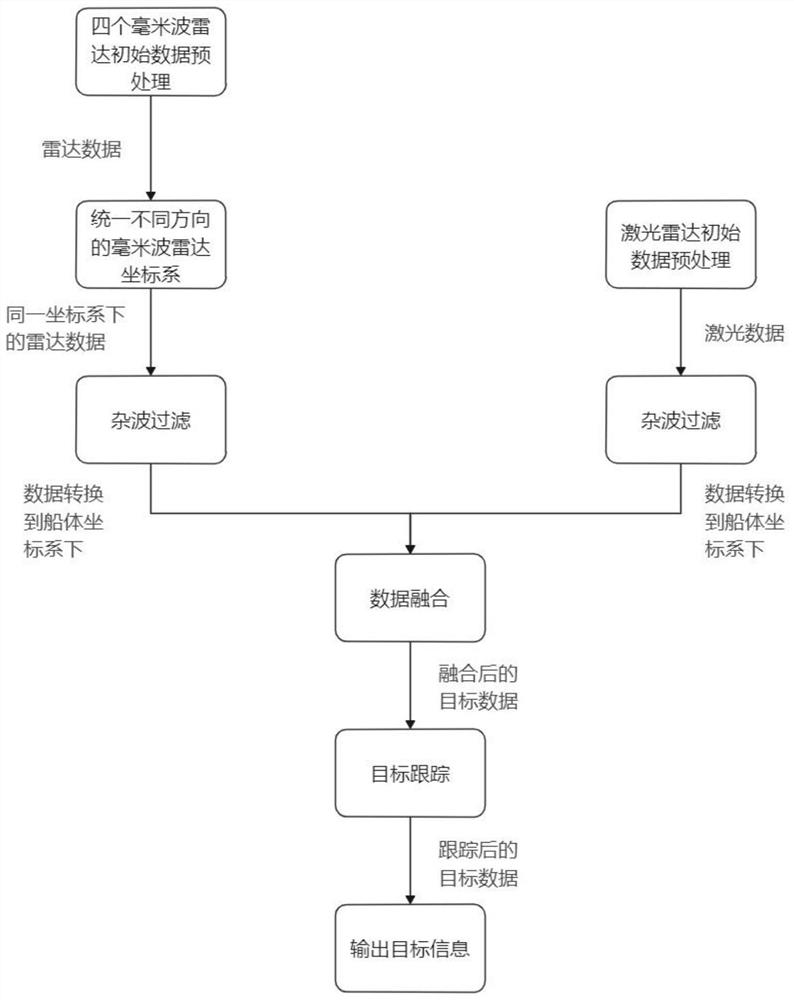
[0095] like Figure 4 As shown, the present embodiment provides a method for tracking an unmanned surface target based on multi-sensor fusion, including:
[0096] Step 100: Obtain the original point cloud data collected by the lidar.
[0097] Step 200: Obtain the original millimeter wave data collected by the millimeter wave radar; wherein, both the laser radar and the millimeter wave radar are located on the unmanned boat.
[0098] Step 300: Perform fusion processing on the original point cloud data and the original millimeter wave data to obtain fused target information.
[0099]Step 400: Track the target on the sea based on the fused target information.
[0100] Wherein, step 300 specifically includes:
[0101] The original point cloud data is preprocessed to obtain the position information of the first target in the hull coordinate system; the first target is the target detected by the laser radar.
[0102] judging whether the original millimeter wave data contains tar...
Embodiment 3
[0109] like Figure 5 As shown, this embodiment provides a multi-sensor fusion-based sea surface target tracking device for unmanned boats, including: a laser radar, a millimeter-wave radar and an industrial computer installed on the unmanned boat.
[0110] The lidar is used to collect raw point cloud data.
[0111] The millimeter wave radar is used to collect original millimeter wave data.
[0112] The industrial computer includes:
[0113] The laser radar data detection module is used to obtain the original point cloud data collected by the laser radar.
[0114] The millimeter-wave radar data detection module is used to obtain the original millimeter-wave data collected by the millimeter-wave radar.
[0115] A data fusion module, configured to perform fusion processing on the original point cloud data and the original millimeter wave data to obtain fused target information.
[0116] A tracking module, configured to track targets on the sea based on the fused target infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com