Robot task exception handling method
An exception handling and robotics technology, applied in the field of robotics, can solve the problems of increasing delivery time and management pressure, low delivery efficiency, and task interruption, and achieve the effect of improving delivery efficiency, ensuring safety, and achieving self-recovery.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with embodiment.
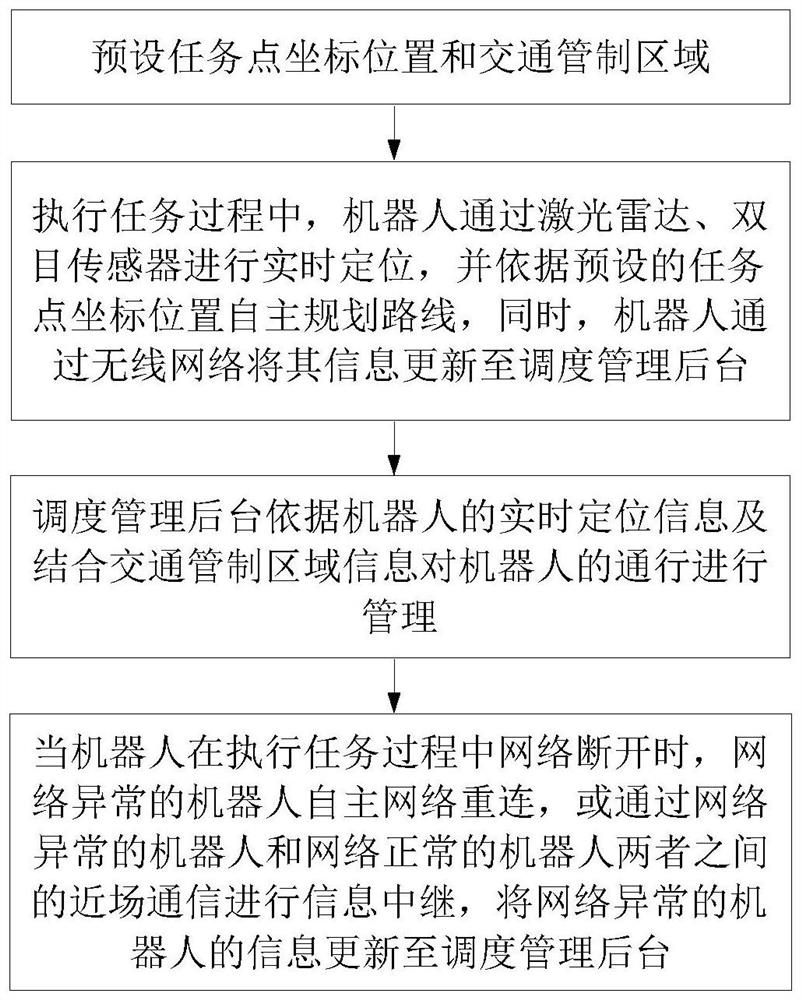
[0033] refer to Figure 1 to Figure 4 , the working steps of the robot task exception handling method are as follows:
[0034] S1. Preset the coordinate position of the task point and the traffic control area.
[0035] Specifically, the traffic control area is a polygonal area on the map, and the number of robots that can enter the area at the same time is preset. After the number exceeds the number, other robots can only wait outside the area.
[0036] S2. During the execution of the task, the robot performs real-time positioning through the laser radar and the binocular sensor, and independently plans the walking route according to the preset coordinate position of the task point. At the same time, the robot updates its information to the dispatching management background through the wireless network.
[0037] S3. The scheduling management background manages the passage of the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com