Mode-based letter fusion system modeling and verification method for period controller
A system modeling and controller technology, applied in the field of token fusion system modeling and verification, can solve the problems of high security requirements in system design, complex calculation and control combination, etc., to achieve easy-to-describe effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
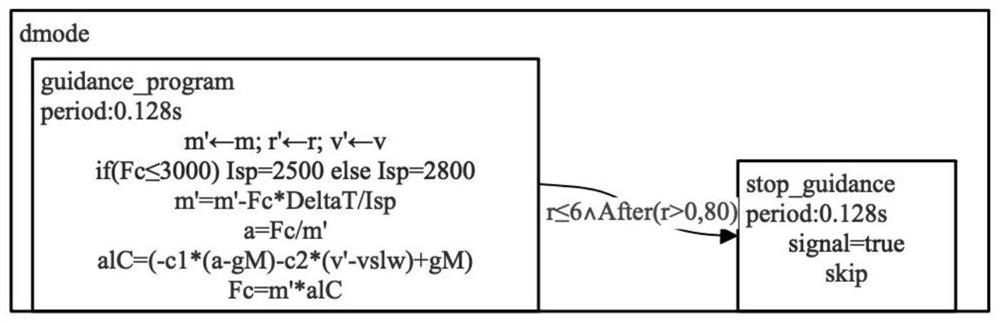
[0096] Such as figure 1 is the discrete mode and its control flow in the token fusion system, which consists of two discrete modes. A discrete mode is the guidance mode guidance_program with a period of 0.128s. First, it will sample the mass m, position r and velocity v of the current lunar lander, which are continuous variables in the continuous mode. Then, the specific impulse Isp of the thrust engine of the lander is determined according to the thrust Fc applied to the lander. Finally, the new thrust Fc applied to the lander is obtained through a series of calculations, where m' represents the mass of the lander after the update, DeltaT represents the sampling period, a represents the intermediate variable acceleration, alC is the required acceleration, c1 and c2 represent the control coefficient in the guidance process, and gM represents the gravitational acceleration. Indicates that another discrete mode is a free-fall mode with a period of 0.128s. At this time, the sys...
Embodiment 2
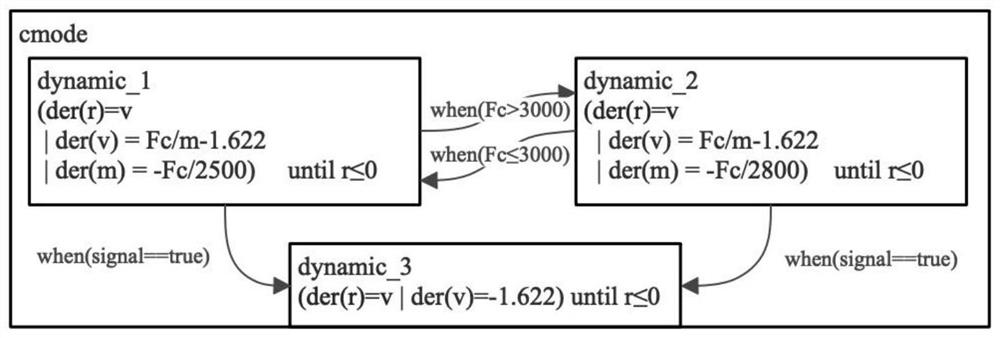
[0098] Such as figure 2 is the continuous pattern and its control flow in the token fusion system. It consists of three consecutive patterns. Continuous mode 1 dynamic_1 and continuous mode 2 dynamic_2 both represent the change law of the current position r, velocity v and mass m of the lander when the system is guided, expressed by differential equations, and their termination conditions are all r≤0. When the thrust Fc applied to the lander issued by the controller is >3000, the continuous mode one will be transferred to the continuous mode two, and when Fc≤3000, the continuous mode two will be transferred to the continuous mode one. The continuous mode three dynamic_3 indicates the change law when the system no longer applies thrust and the lander starts to fall freely, and the termination conditions are all r≤0. Only when the system sends a signal signal, will it enter continuous mode three from continuous mode one or two.
Embodiment 3
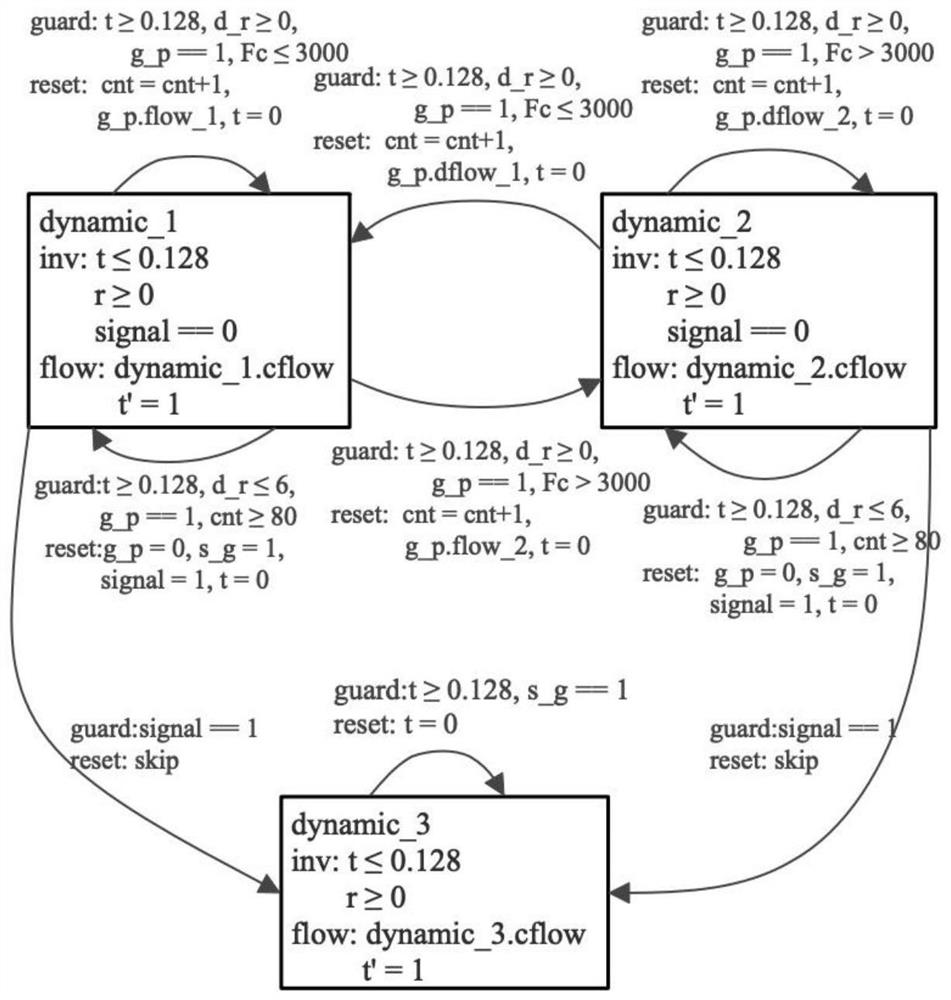
[0100] Such as image 3 It is a hybrid automaton model that converts the token fusion system model of the lunar lander's slow descent stage into a hybrid automaton model by applying conversion rules. For the simplicity of the picture, use g_p.dflow to represent the control flow of the guidance mode, use g_p.dflow_1 to represent the control flow after replacing the conditional statement with the first half of the conditional statement, and use g_p.dflow_2 to represent the second half of the conditional statement to replace the condition The control flow after the statement is updated, use dynamic_1.cflow, dynamic_2.cflow, dynamic_3.cflow to represent the control flow of the continuous mode respectively. According to the rules, new variables t and cnt are introduced to represent time and counter respectively, and variable names g_p and s_g are introduced to represent the current discrete mode. Other control flows and transition conditions are converted one by one according to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com