Sitting-type walking rehabilitation robot having improved entering features
A rehabilitation robot and gait technology, applied in the direction of manipulators, manufacturing tools, passive exercise equipment, etc., can solve the problems of increased labor costs, increased training costs, easy accumulation of foreign objects, and large volume, and achieve the effect of minimizing the help of medical staff
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Below, will refer to Figure 2 to Figure 6b The drawings describe in detail embodiments of the present disclosure, in which like numerals are in Figure 2 to Figure 6b refer to the same elements. Meanwhile, illustrations and detailed descriptions about elements and their operations and effects that will be easily understood by those of ordinary skill in the art based on general technology will be simplified or omitted in the drawings, and only relevant parts of the present disclosure will be shown.
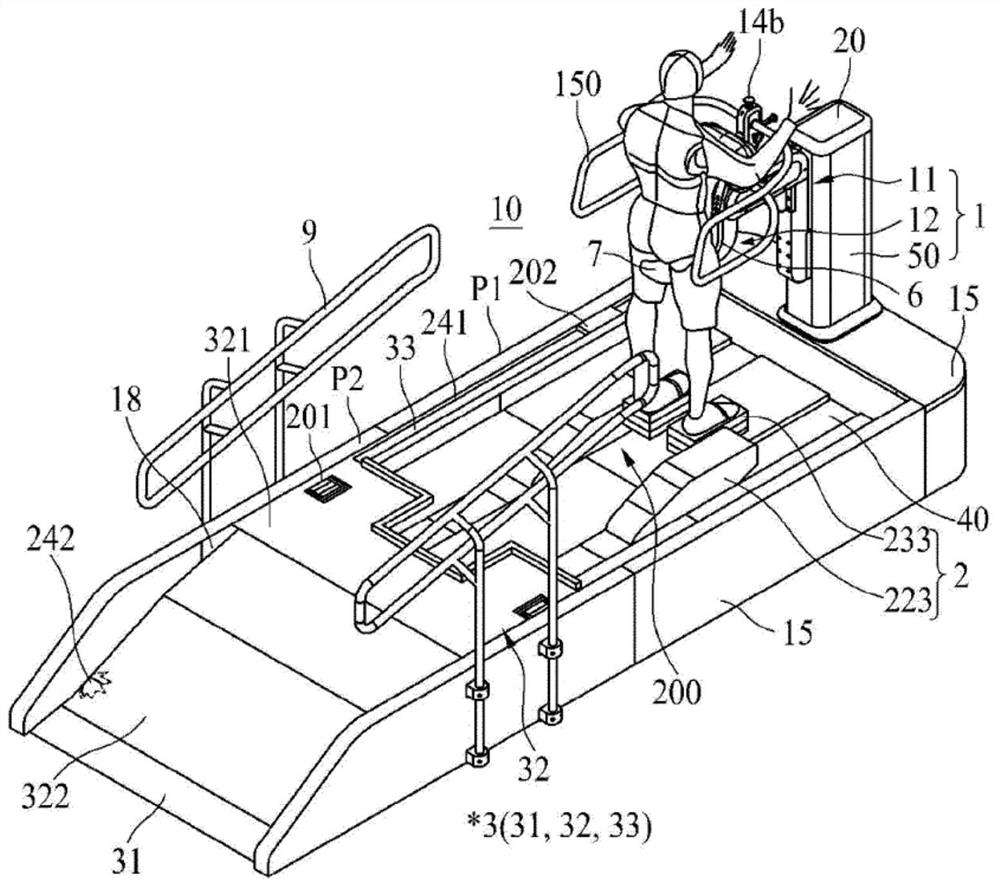
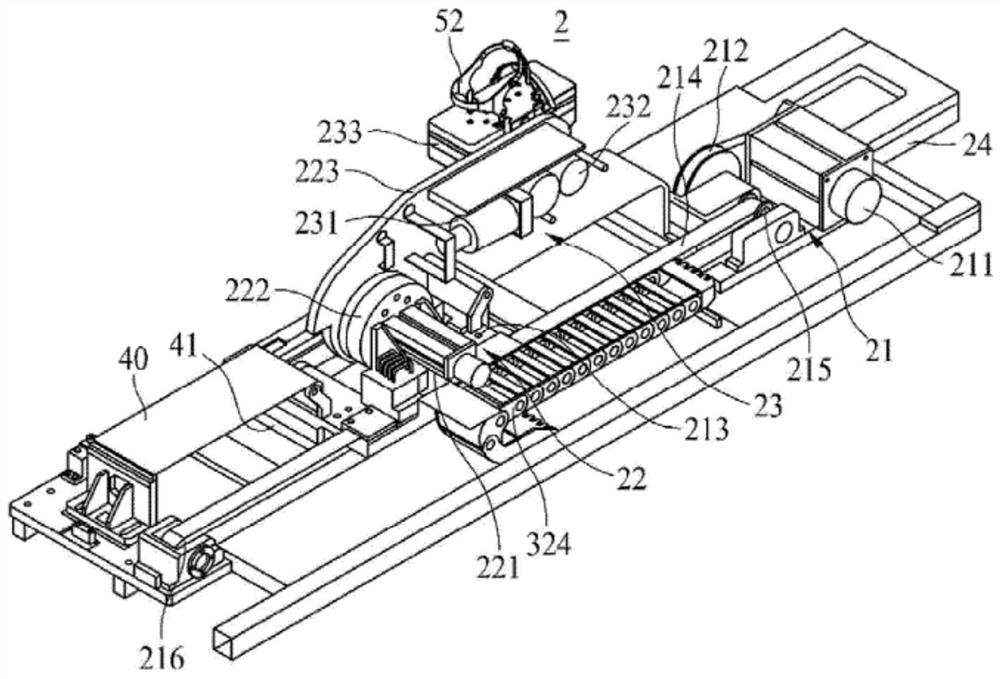
[0049] figure 2 is a perspective view showing a sitting gait rehabilitation robot with improved accessibility according to the first embodiment of the present disclosure, image 3 is a perspective view showing a seated gait rehabilitation robot with improved accessibility according to the first embodiment of the present disclosure, in which some parts are separated.
[0050] refer to figure 2 and image 3 , according to the first embodiment of the present invention, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com