Obstacle avoidance shortest path planning method based on Voronoi diagram
A shortest path and obstacle avoidance technology, applied in the field of path search, can solve the problems of high complexity of obstacle avoidance algorithms, achieve the effects of eliminating the possibility of collision, reducing algorithm complexity, and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention will be described below in conjunction with the accompanying drawings.
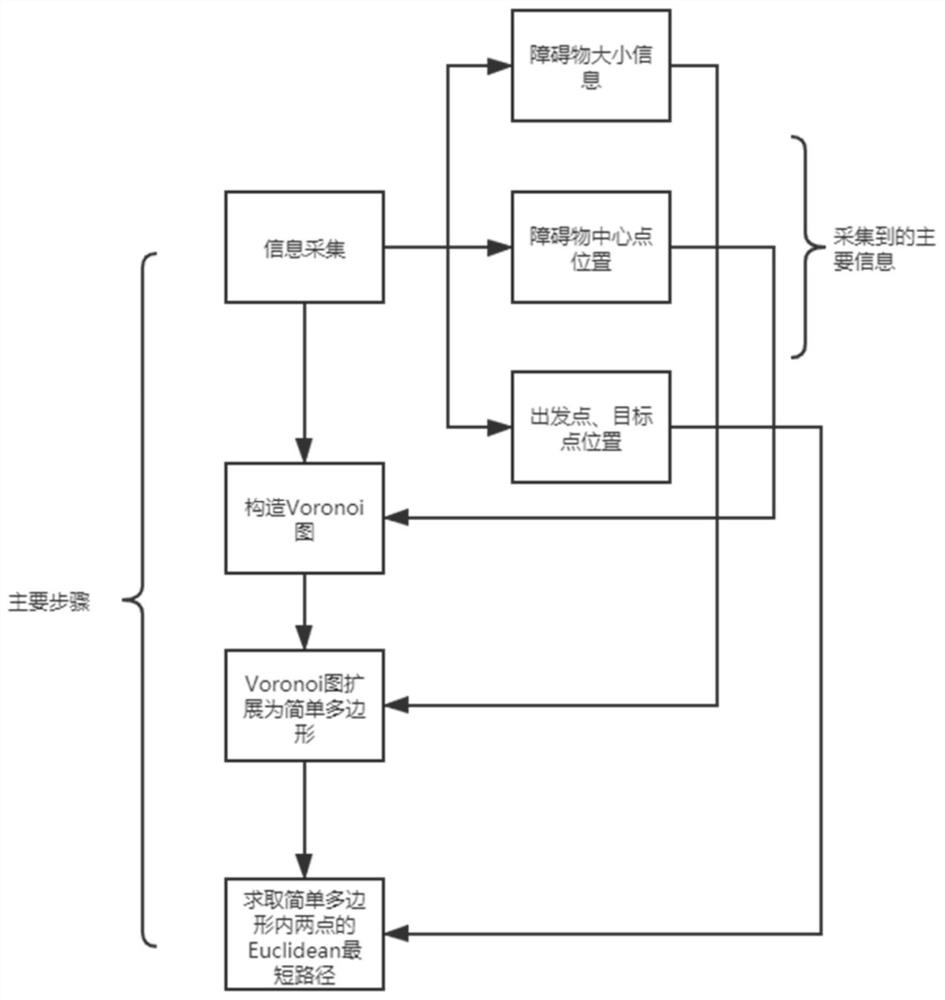
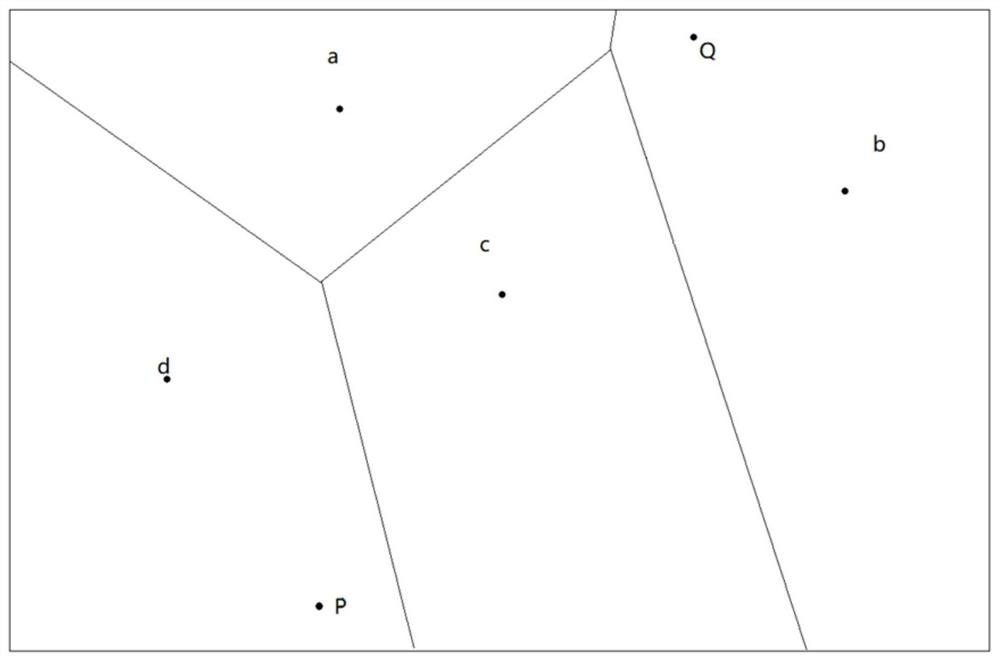
[0039] Such as figure 1 As shown, the present invention is based on the obstacle avoidance shortest path planning method of Voronoi graph, and this method mainly comprises information collection, constructs Voronoi graph, Voronoi graph expands into simple polygon and obtains these four steps of the Euclidean shortest path of two points in simple polygon, Specific steps are as follows:
[0040] Step 1: Information collection.
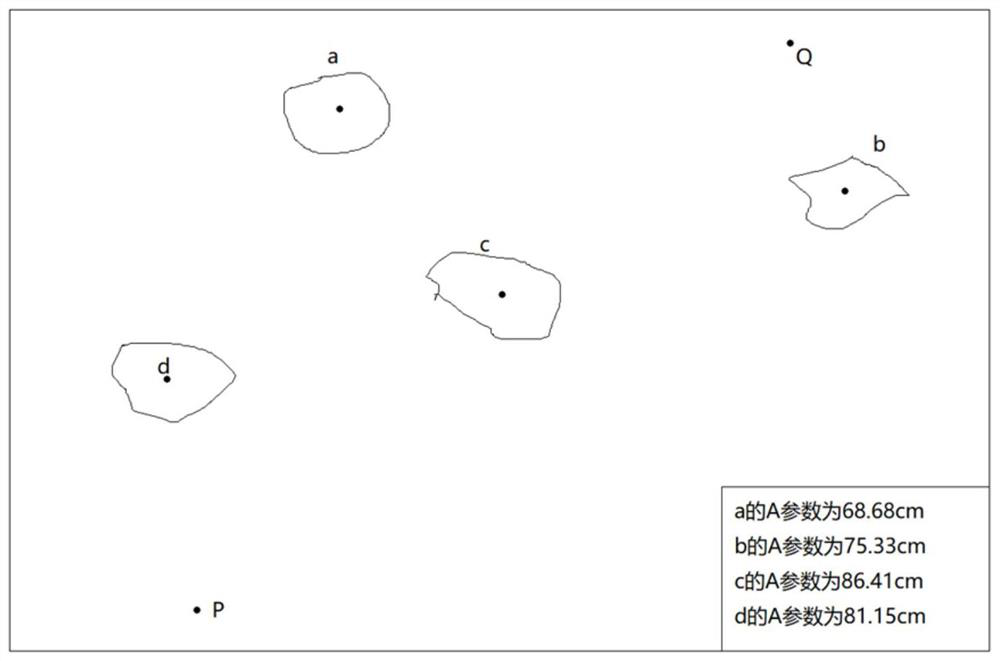
[0041] Collect various information of obstacles through the camera, including the location of the starting point, the location of the destination point, the size of the obstacle and the location of the center point of the obstacle, and record these information; through the collection of information, the starting point, destination point and each obstacle can be obtained area of things.
[0042] Wherein, the parameter for recording the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com