Chimpanzee bionic walking robot
A walking robot and gorilla technology, applied in the field of bionic robots, can solve the problems of inflexible movement mode transformation and application, and achieve the effects of intuitive movement mode, improved driving speed, and improved teaching demonstration effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0036] This embodiment provides a gorilla bionic walking robot, which uses the walking limbs modeled on the gorilla, and each leg is an independent limb to realize the multi-mode leg posture capable of bipedal gait walking, quadrupedal movement and rolling forward. The walking robot can act as a simulated mechanical carrier for reconnaissance, survey, rescue and other tasks in complex road conditions.
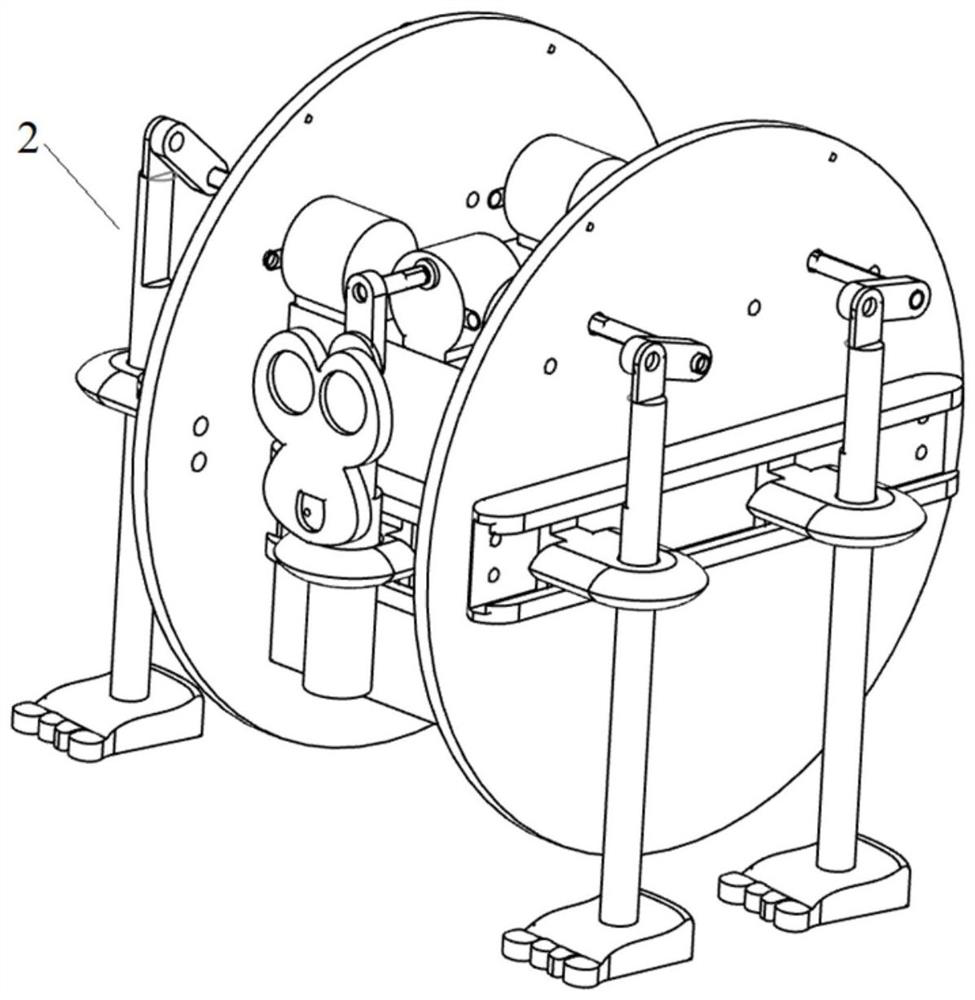
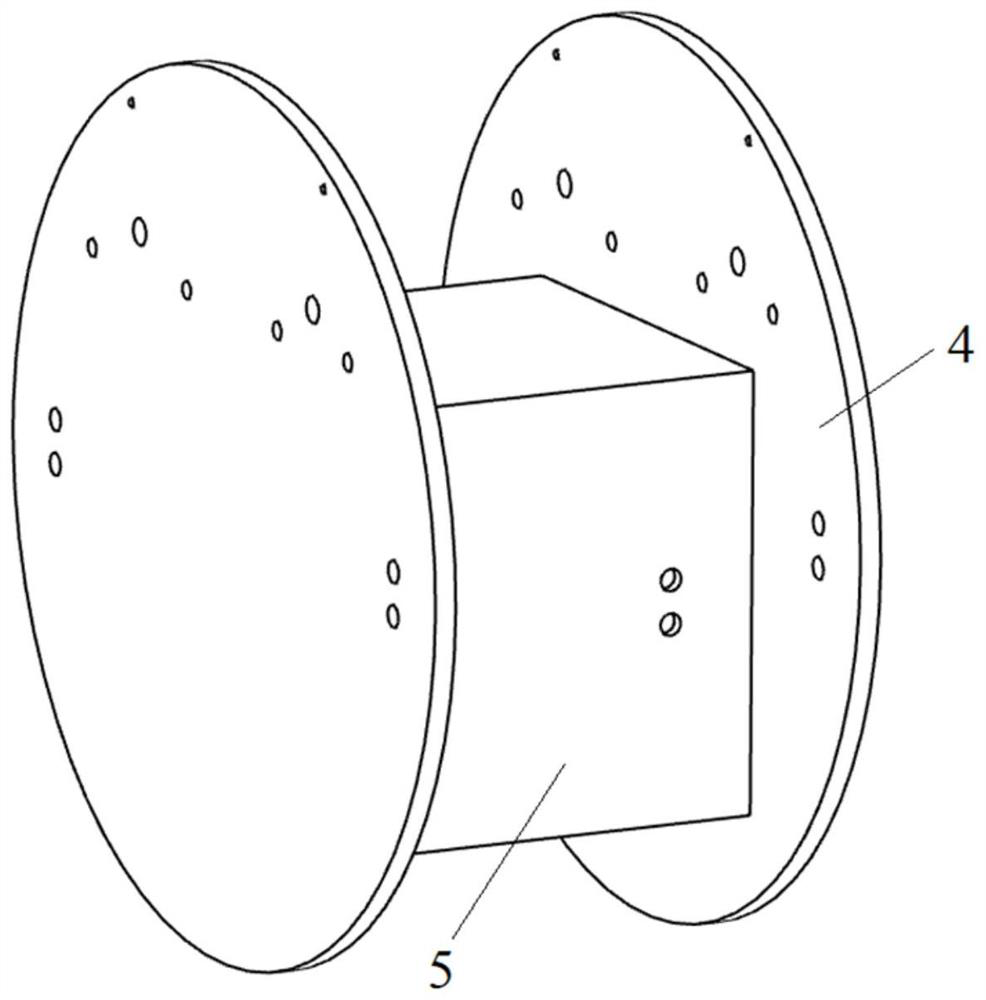
[0037] refer to Figure 1-Figure 10 As shown, the gorilla bionic walking robot of the present embodiment includes a main frame 1, an action execution module 2 and a control module 3, wherein the main frame 1 includes a box body 5 and discs 4 on both sides of the box body 5 are symmetrically arranged, and the control module 3 is arranged in the box body 5; the action execution module 2 includes four foot movement mechanisms, forming four legs of the robot, and every two foot movement mechanisms are installed on the disc 4 through the first slide rail 6, and each foot movement T...
Embodiment 2
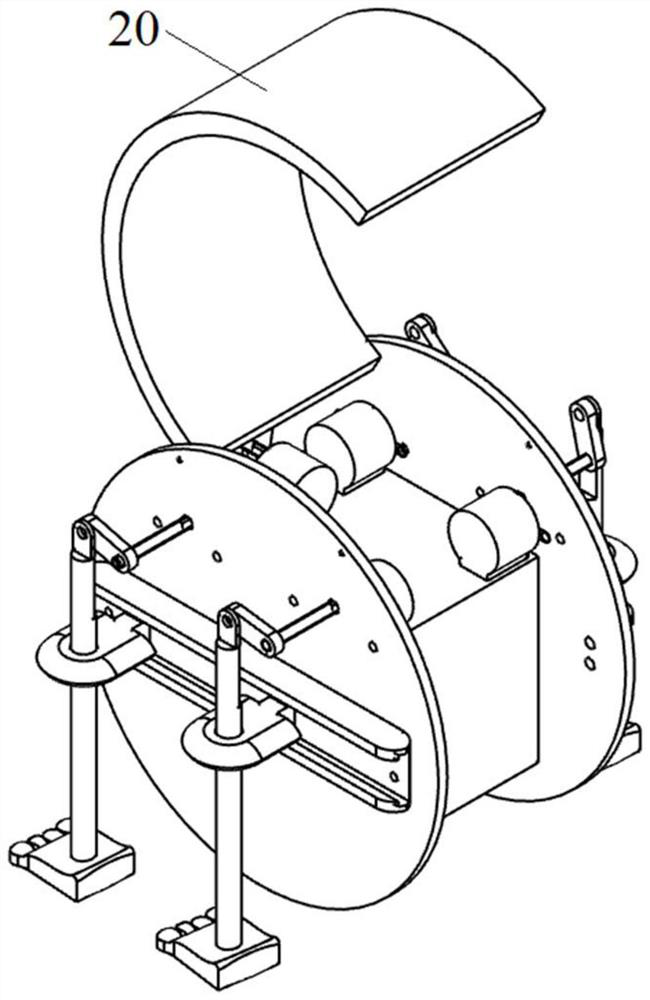
[0048] refer to Figure 1-Figure 10As shown, in the gorilla bionic walking robot provided in this embodiment, the action execution module 2 also includes a head motion mechanism, which is arranged between the two discs 4 and installed in the box through the second slide rail 13. body 5. The head motion mechanism comprises a second stepper motor 14, a second crank connection unit, a second slider 18 and a head 19, the control module 3, the second stepper motor 14 and the second crank connection unit are connected in sequence, and the second slider The block 18 is slidably disposed on the second slide rail 13, the second crank connection unit is connected with the second slide block 18, and the head 19 is installed on the second crank connection unit. The second crank connection unit includes a second crankshaft 15, a second crank 16 and a second connecting rod 17 connected in sequence, the second crankshaft 15 is connected with the second stepping motor 14, and the second conn...
Embodiment 3
[0050] The gorilla bionic walking robot provided in this embodiment is also connected to a mobile terminal through a Bluetooth communication chip. A mobile phone APP is installed in the mobile terminal to realize the walking movement of the robot and the communication connection with the mobile phone APP. Users can change the movement frequency of the four legs through the mobile APP to realize different movement modes of the gorilla bionic walking robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com