RRT-based grid map traversal algorithm
A grid map and traversal algorithm technology, applied in the field of robotics, can solve problems such as sub-node rushing out, missing detection, and few black pixels
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
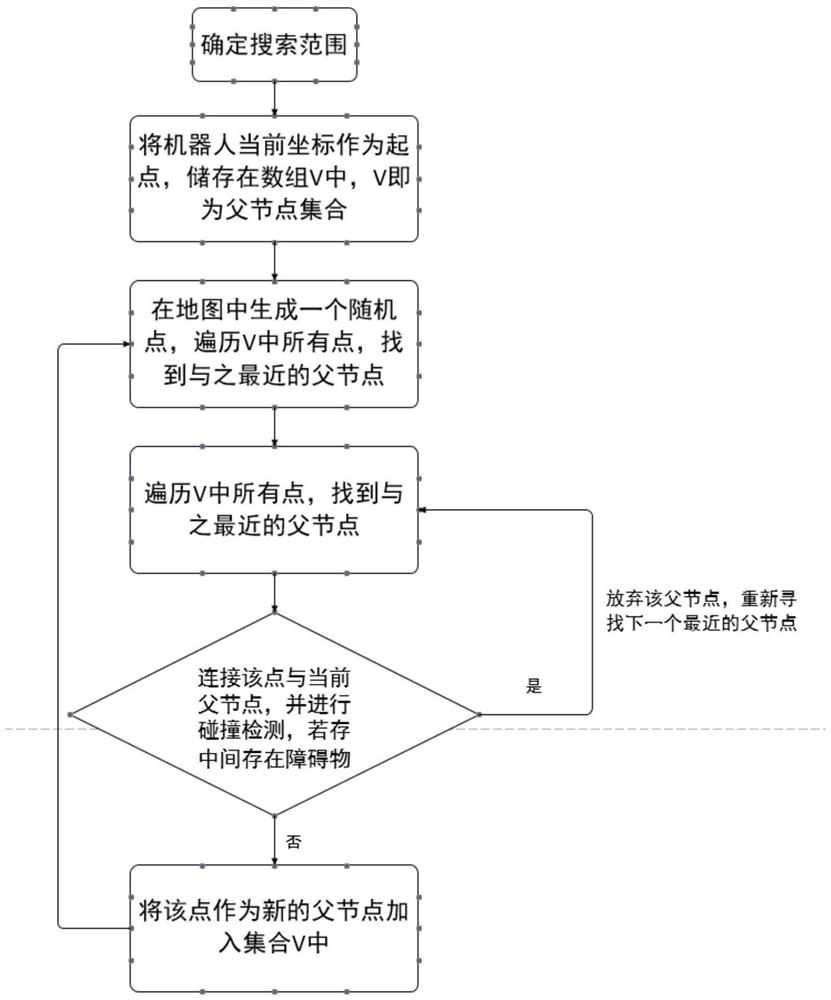
[0035] figure 1 is a flowchart for traversing the environment, such as figure 1 As shown, the improved grid map traversal algorithm based on RRT of the present invention comprises the following steps:
[0036] Step 1. Determine the search scope;
[0037] Determine the search range according to the grid map to be explored by the robot;
[0038] After placing the robot in an unknown area, the robot first rotates 360° on the spot to scan the prototype of the current environment map, and then determine a rectangular area as the current search range based on the length and width of the map (x_map, y_map). In the process of continuous establishment of the map, x_map and y_map are constantly increasing, and the rectangular search area is also constantly increasing.
[0039] Step 2. Within the search range determined in Step 1, take the location of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com