Self-organizing system and method of UAV swarm network based on task cognition
A technology of self-organizing system and cluster network, which is applied in the field of self-organizing system of unmanned aerial vehicle cluster network based on task cognition, can solve the problem of not considering the type of information business and transmission characteristics, the theoretical research of network architecture is separated from the cluster task, and cannot match the chain Problems such as the mutual coupling characteristics of the transmission layer and the application layer at the road layer have achieved the effect of improving search and delivery efficiency, improving reliability and efficiency, and responding flexibly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below with reference to the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
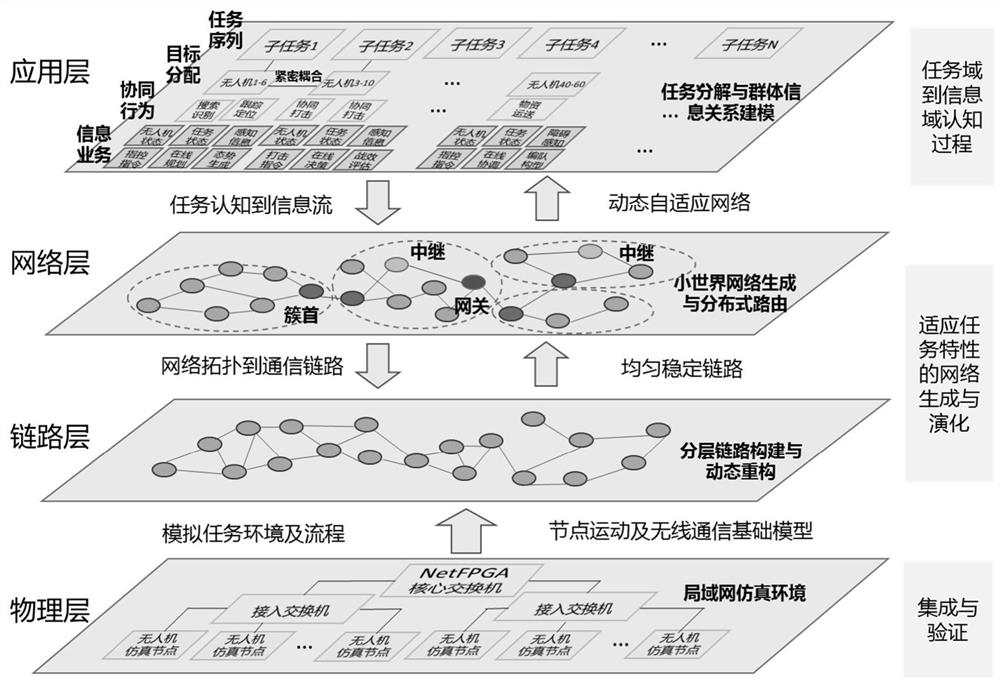
[0064] like figure 1 As shown, the self-organizing system of the UAV swarm network based on task cognition in this embodiment includes:
[0065] The application layer is used to establish the representation method and model from the cluster task domain to the network information domain, and obtain the information cross-linking relationship within the cluster;
[0066] The network layer is used to construct the network logical topology relationship based on the information association relationship of each node in the cluster established by the application layer, and generate a network topology relationship diagram;
[0067] The link layer is used to realize the structural design and generation of the network, construct network links through the network logical top...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com