A rhombus vehicle automatic driving path tracking control method, system and vehicle
A technology of path tracking and control method, applied in the direction of control device, vehicle components, driver input parameters, etc., can solve the problems of inability to achieve diamond-shaped vehicle tracking performance, different dynamic performance, insufficient vehicle motion control accuracy, etc., to achieve an excellent path. Effects of tracking performance, excellent steering performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0077] An unmanned driving path tracking control method for diamond-shaped vehicles, such as Figure 4 As shown, the specific steps are as follows:
[0078] Step S001, determining relevant parameters.
[0079] Specifically include: setting control parameters: mode switching threshold v M , preview distance D L , parameter matrix R, parameter matrix Q;
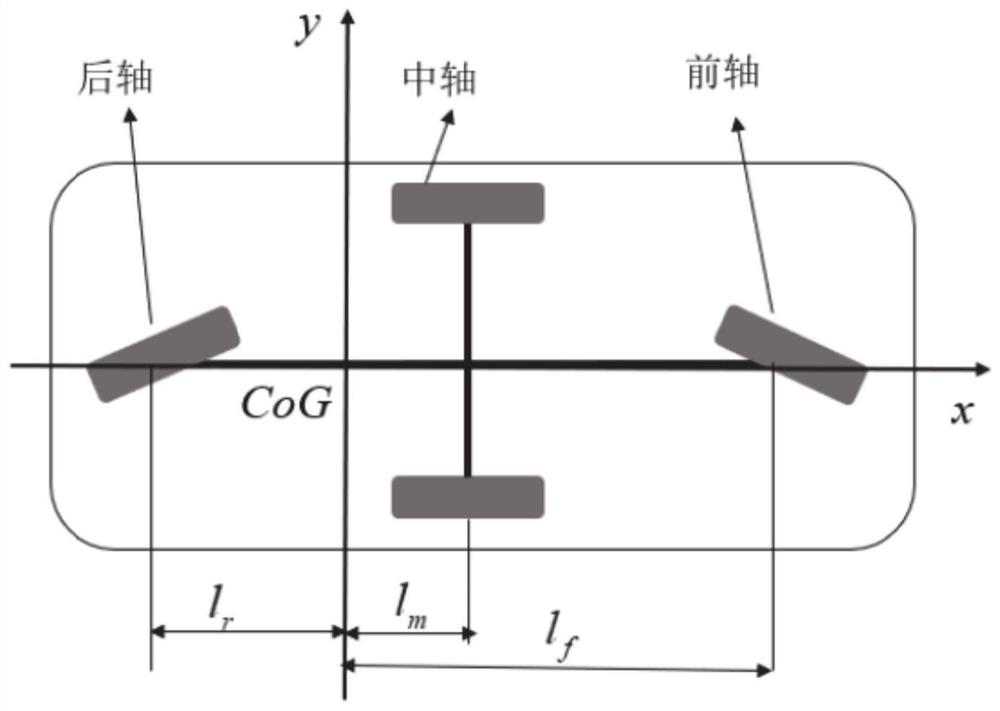
[0080] Determine the geometric parameters of the vehicle: the distance l between the rear axle of the vehicle and the center of mass of the vehicle r , the distance between the center axis of the vehicle and the center of mass of the vehicle l m , the distance between the front axle of the vehicle and the center of mass of the vehicle l f , the distance between the rear wheelbase of the vehicle and the central axis l rm , the distance between the front axle of the vehicle and the center axle of the vehicle l fm ;
[0081] Determine the dynamic parameters of the vehicle: the mass of the vehicle M, the moment of inertia I...
Embodiment 2
[0125] A rhombus vehicle automatic driving path tracking control system, comprising:
[0126] The parameter determination module is configured to determine the geometric parameters and dynamic parameters of the diamond-shaped vehicle, and set the control parameters;
[0127] a speed acquisition module configured to acquire the longitudinal speed of the vehicle;
[0128] The control module according to working conditions is configured to judge the relationship between the vehicle longitudinal speed and the set speed control threshold, if the vehicle longitudinal speed is less than the speed control threshold, use the geometry-based preview control method to perform path tracking control, otherwise use the dynamics-based The preview control method performs path following control.
Embodiment 3
[0130] A diamond-shaped vehicle adopts the method provided in Embodiment 1 or includes the system provided in Embodiment 1 or Embodiment 2.
[0131] Diamond shaped vehicles also include:
[0132] A positioning module is used to obtain the location information of the diamond-shaped vehicle;
[0133] The perception module is used to obtain the motion state information of the diamond-shaped vehicle;
[0134] A planning module for generating desired paths.
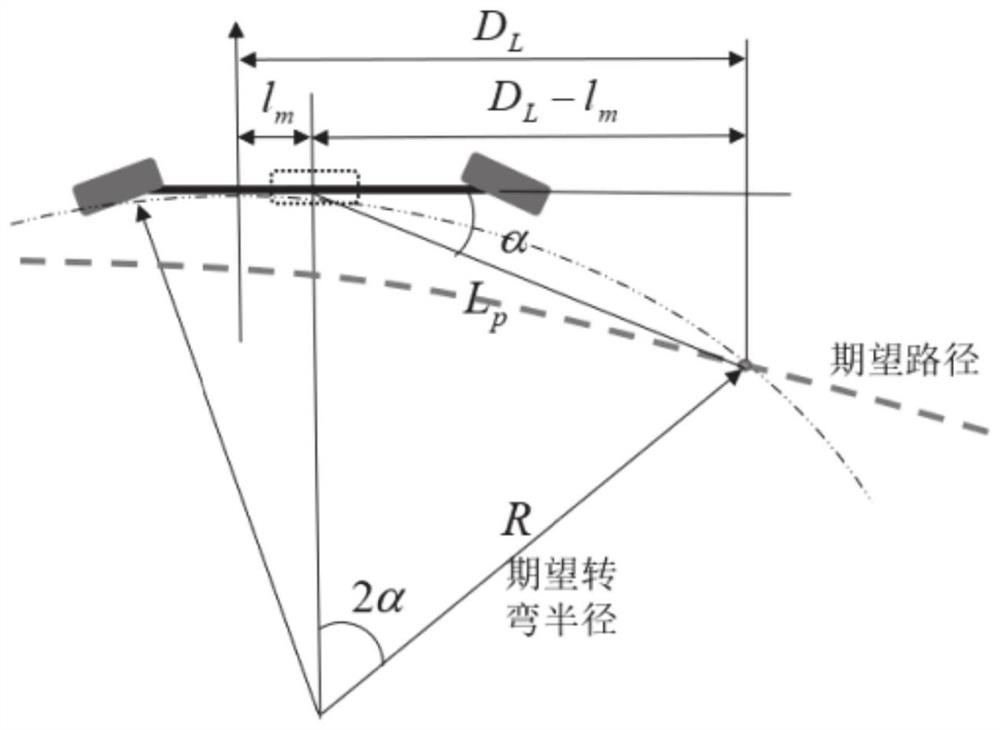
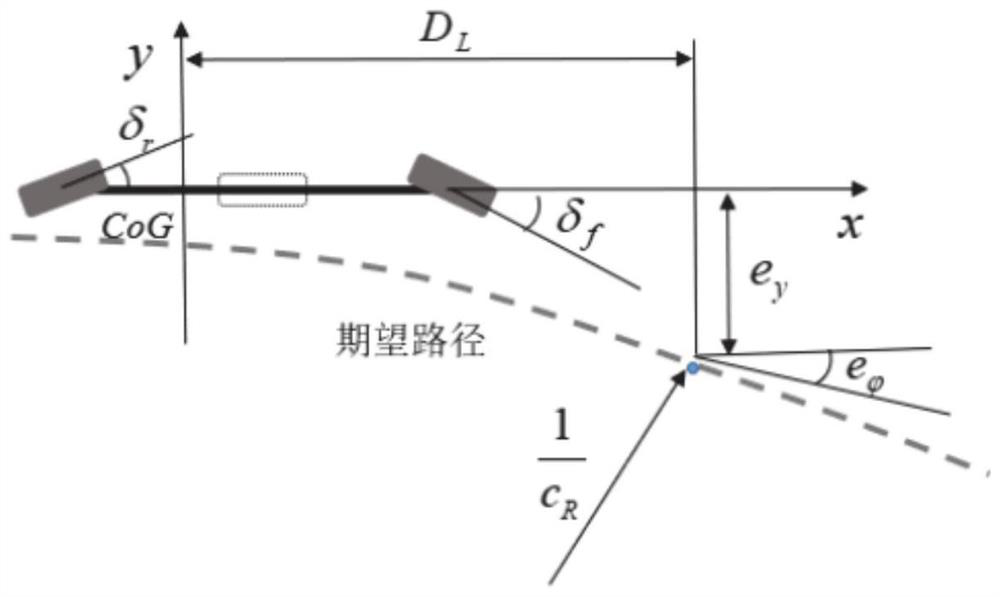
[0135] According to the positioning module and the perception module, it is possible to obtain the vehicle's own speed v x , Yaw rate Lateral velocity v y , the vehicle lateral offset e y , vehicle yaw angle error And the status information of the angle α between the line from the center of the vehicle's central axis to the preview point and the x-axis.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com