


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Light vision guiding method for docking and recycling of AUV
An optical vision, recycling tube technology, applied in instruments, underwater operation equipment, measuring devices, etc., to achieve the effect of ensuring matching accuracy, good reliability and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
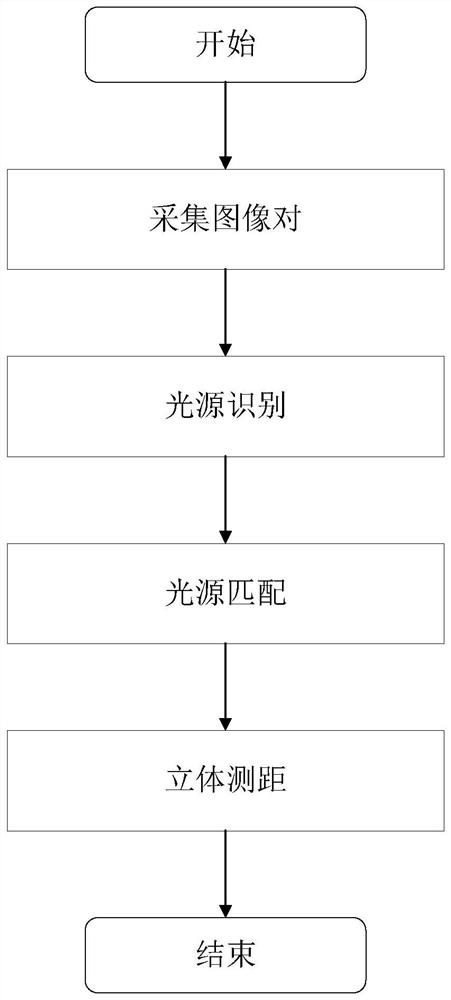
[0094] figure 1 The system flow of the present invention has been expressed, and the specific implementation steps are as follows:
[0095] Step (1): Input the left and right image pairs: when the AUV is docking at close range, use the equipped stereo camera to collect the image pairs of the light source array of the base station, and continuously input them into the optical vision guidance program to enter step (2);
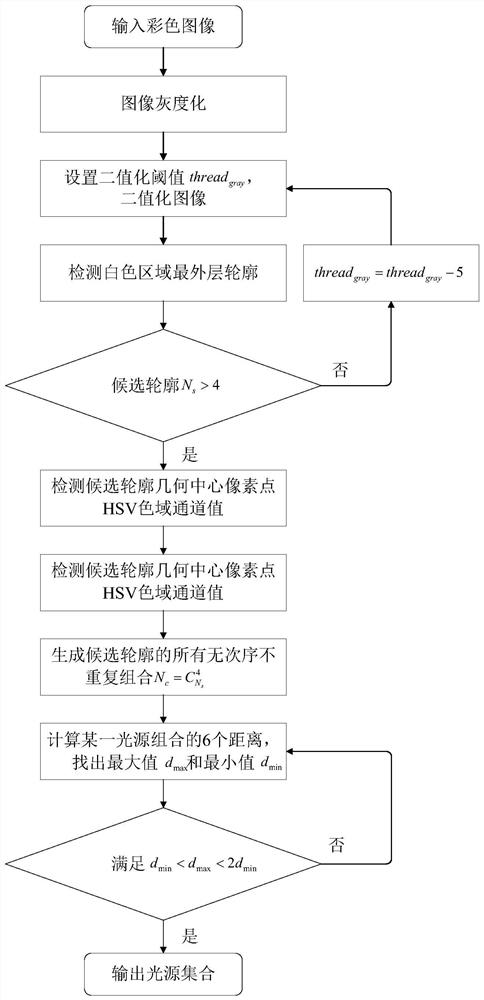
[0096] Step (2): Light source identification: Carry out adaptive binarization and false light source removal on the left and right images respectively, obtain the positions of all light sources in the image, and proceed to step (3);
[0097] Step (3): light source matching: get the light source set {Sl i} and {Sr i}, extract the light source features respectively, then compare the consistency of the light source features in the left and right images for pairing, and judge whether the matching is correct through epipolar search, and then enter step (4);
[009...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com