A robot balance control method and device based on reduced-order pole allocation method
A pole configuration method and balance control technology, which is applied in vehicle position/route/height control, attitude control, control/adjustment system, etc., can solve the problems of closed-loop control system oscillation, many feedback variables, and difficult implementation, and eliminate Effects of jerk, reducing feedback variables, and reducing design difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. For the step numbers in the following embodiments, it is only set for the convenience of illustration and description, and the order between the steps is not limited in any way. The execution order of each step in the embodiments can be adapted according to the understanding of those skilled in the art sexual adjustment.
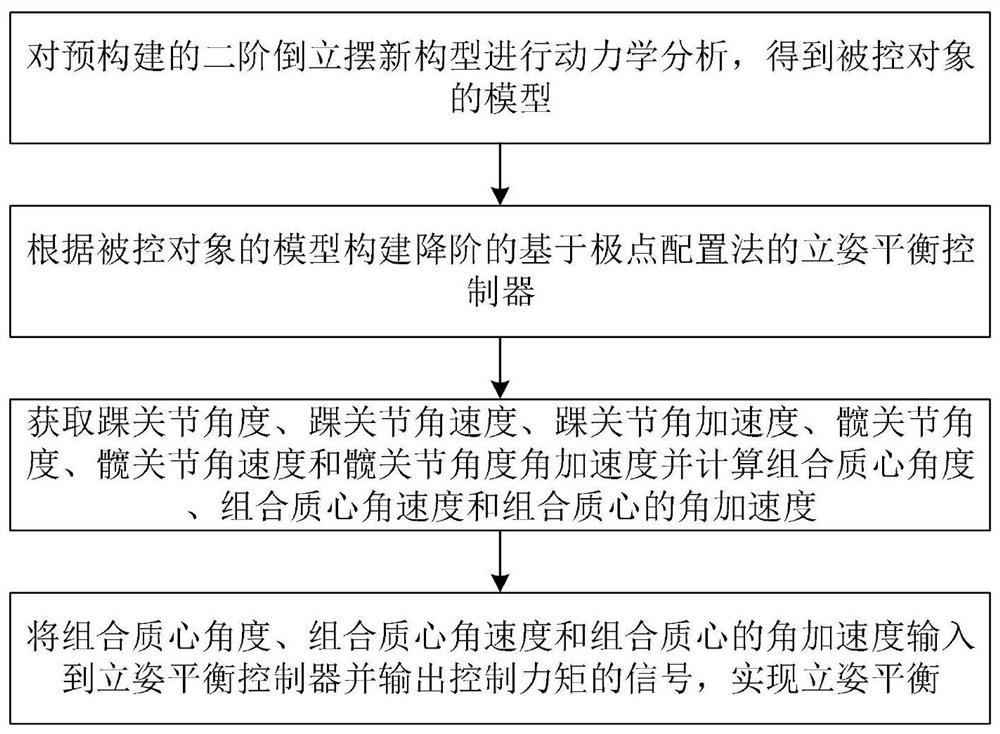
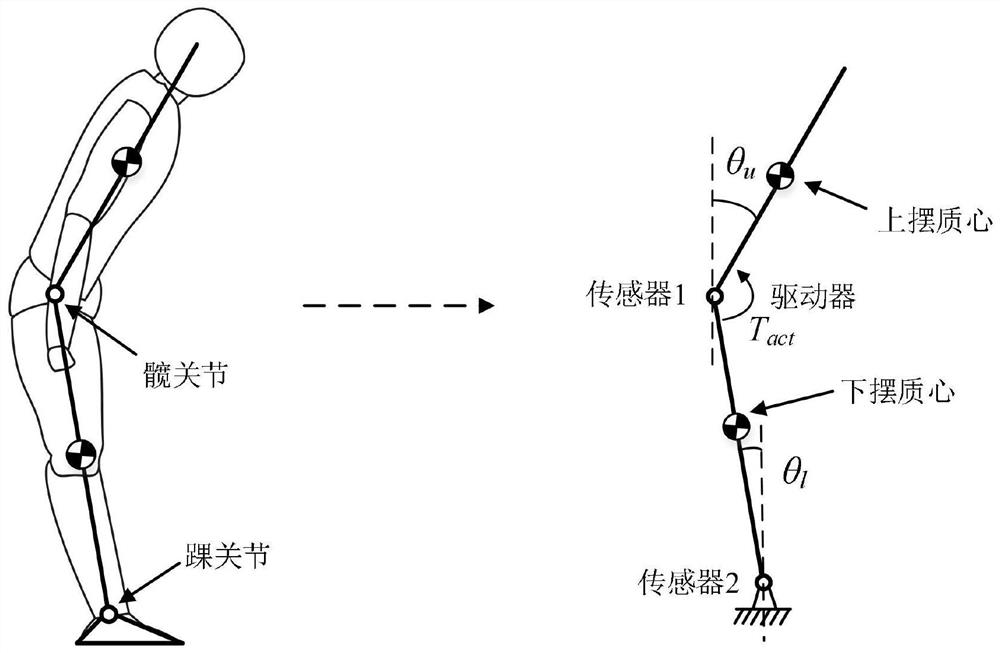
[0043] The whole implementation process is divided into two parts. First, the kinematics and dynamics analysis of the new configuration of the second-order inverted pendulum is carried out, and a mathematical model is established; Standing posture balance controller, and torque control based on the designed controller.
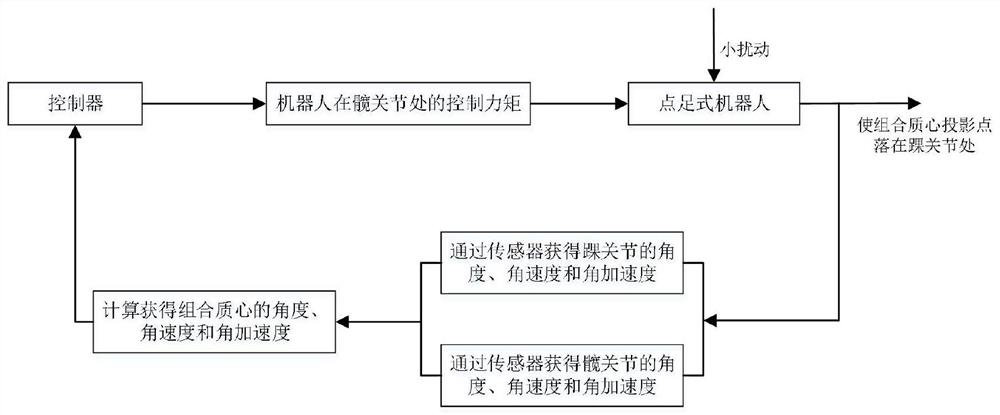
[0044] refer to figure 1 and image 3 , the present invention provides a robot balance control method based on the reduced-order pole allocation method, the method includes the following steps:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com