Passive telemetry robot based on live-action three-dimensional map and measurement method
A technology of three-dimensional maps and robots, which is applied in the field of real-scene three-dimensional map surveying and mapping, can solve the problems of not being able to identify targets, not being able to identify and track targets, and being unusable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions of the present invention will be described below in conjunction with the accompanying drawings, as clearly, the described embodiments are merely embodiments of the invention, not all of the embodiments. Based on embodiments of the present invention, there are all other embodiments obtained without making creative labor without making creative labor.
[0059] The present invention will be further described in detail below with reference to the accompanying drawings.
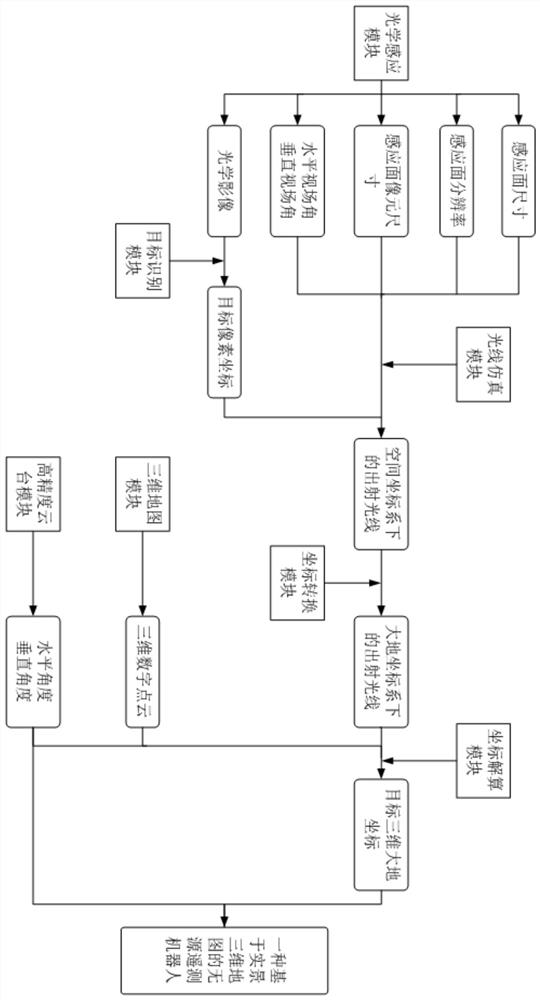
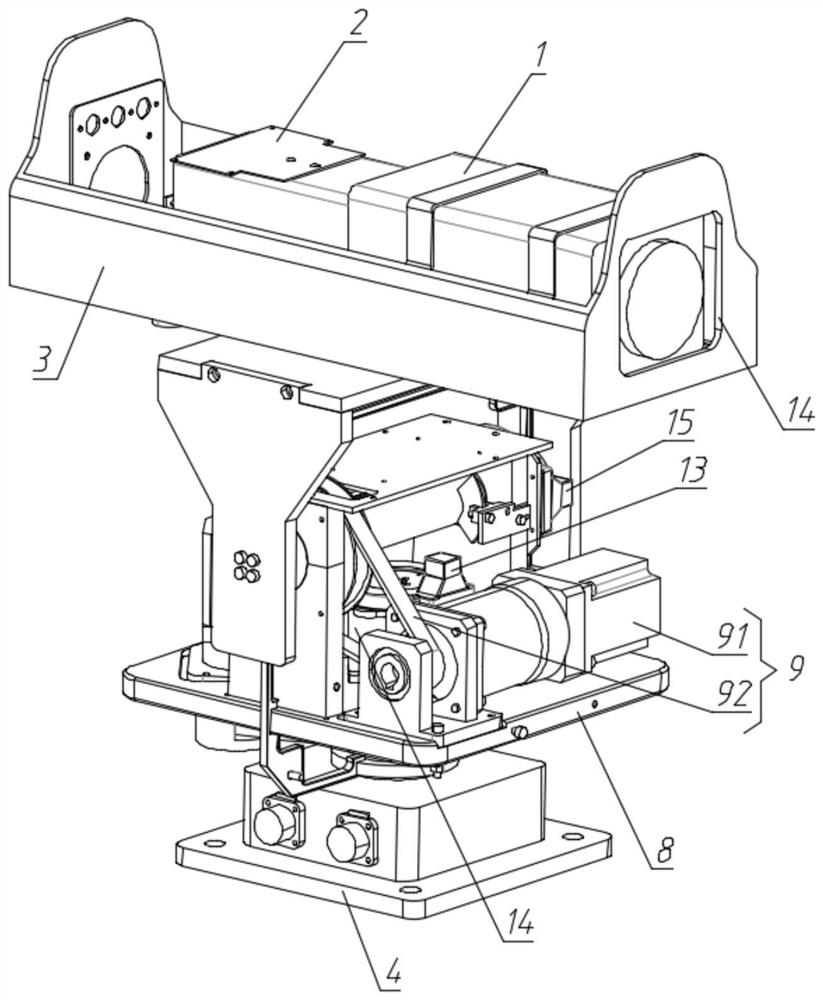
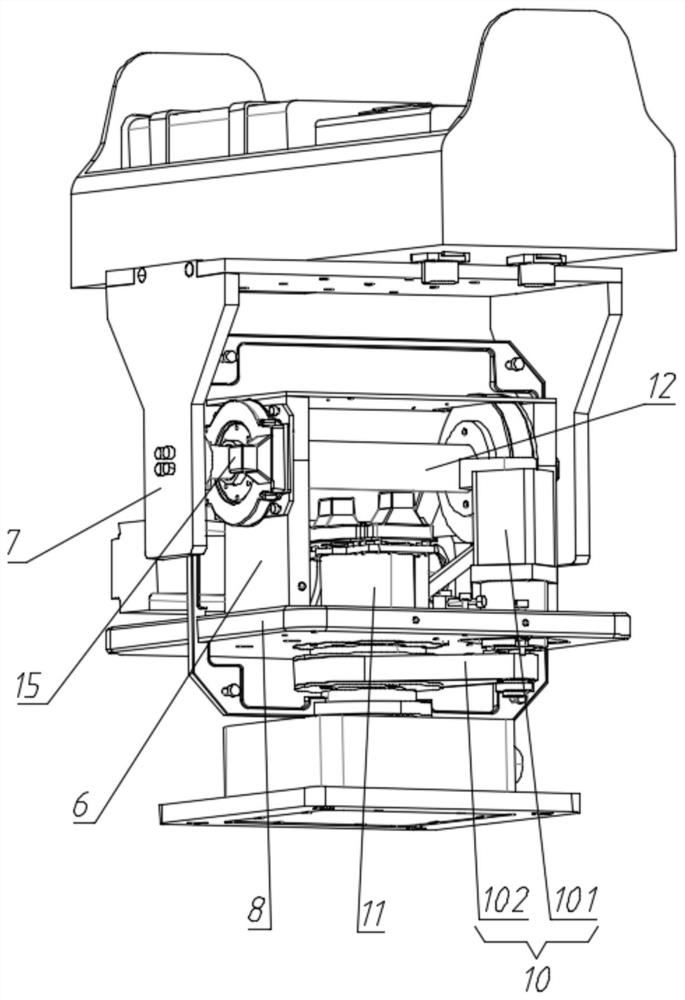
[0060] Such as Figure 1 to 4 As shown, a passive telemetry robot based on a real-view 3D map, including information acquisition modules and data centers, and the information acquisition module is connected to the data center through a communication network.
[0061] The information acquisition module includes an optical sensing module and a high-precision cloud block module, which is disposed on a high precision cloud block module;
[0062] The optical sensing module and the high-precisi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com