Robot joint motion precision measuring method
A technology of robot joints and measurement methods, which is applied in manipulators, manufacturing tools, etc., can solve the problem of inability to evaluate robot joint movement accuracy with motion accuracy, and achieve the effect of improving accuracy and test efficiency, improving accuracy and high degree of automation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
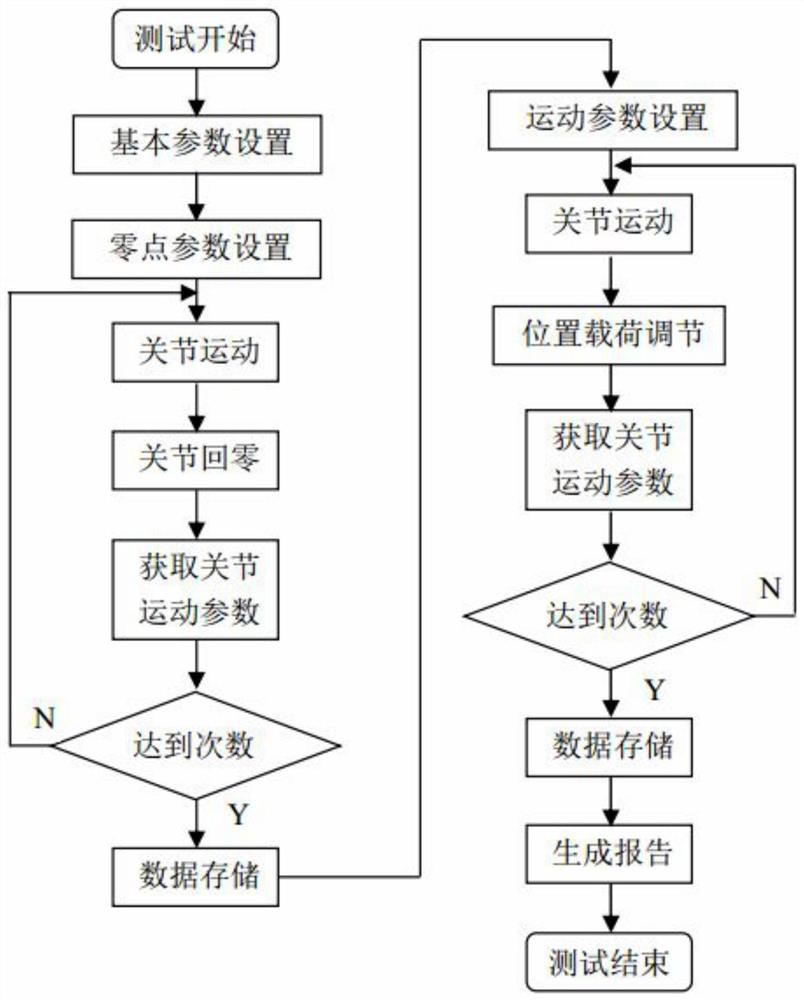
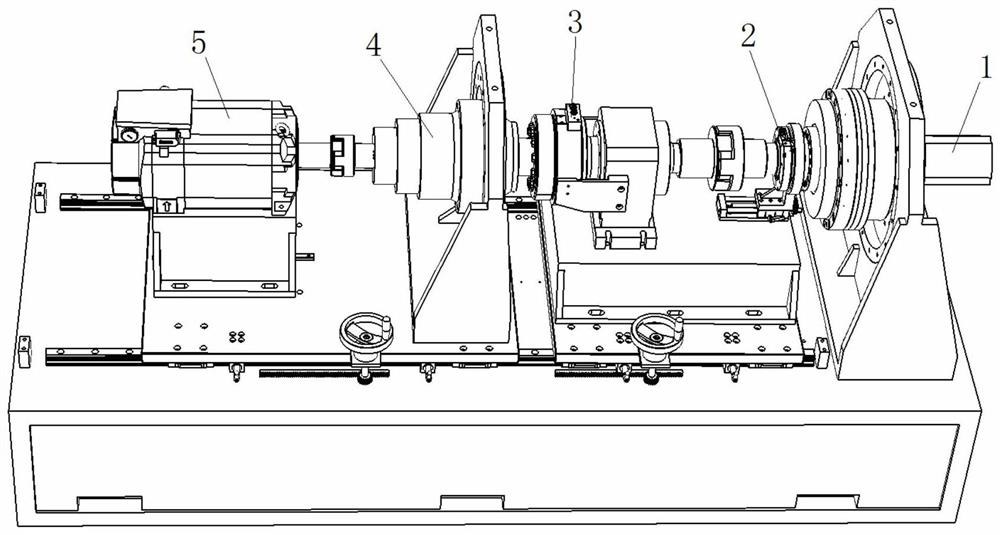
[0037] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0038] like figure 2 As shown, the present invention is realized by a measuring device for the motion accuracy of a robot joint, the measuring device includes an angle encoder 2, a torque speed sensor 3, a load unit and a robot joint 1 to be measured, the robot joint 1, the angle The encoder 2, the torque speed sensor 3, and the load unit are connected in sequence, wherein the load unit includes a servo motor 5 and a speed increaser 4, and the torque speed sensor 3, the speed increaser 4 and the servo motor 5 are connected in sequence, and the speed increaser The device 4 is used to reduce the loading torque of the servo motor 5, and then the low-torque servo motor 5 can be selected to reduce the hardware cost of the measuring device and also reduce the space of the load unit. In this embodiment, the angle encoder 2 is a HEIDENHAIN high-precision angle enco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com