Lower limb exoskeleton robot
An exoskeleton robot and lower limb technology, applied in the field of robotics, can solve problems such as uncontrollable balance, achieve the effects of convenient operation, optimized structure, and reduced use burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
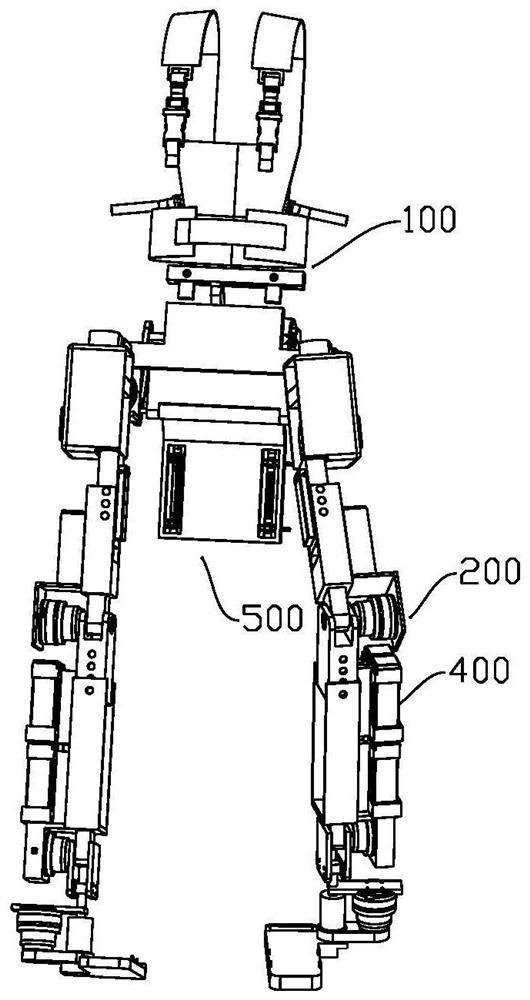
[0061] Such as figure 1 with 2 As shown, the lower extremity exoskeleton robot in this embodiment includes auxiliary components 100 and lower limb components.
[0062] The auxiliary component 100 includes a wearable auxiliary balance mechanism and a first driving member, wherein the auxiliary balance mechanism is used to support the human trunk, and the inclination angle of the auxiliary balance mechanism relative to the coronal plane of the human body can be adjusted through the first driving member, and Drive the movement of the human trunk to change the inclination angle of the human trunk.
[0063] The lower limb components include two leg power-assist mechanisms 200, which are respectively fixed to the left leg and the right leg to provide support and power assistance for the left leg and the right leg. connect.
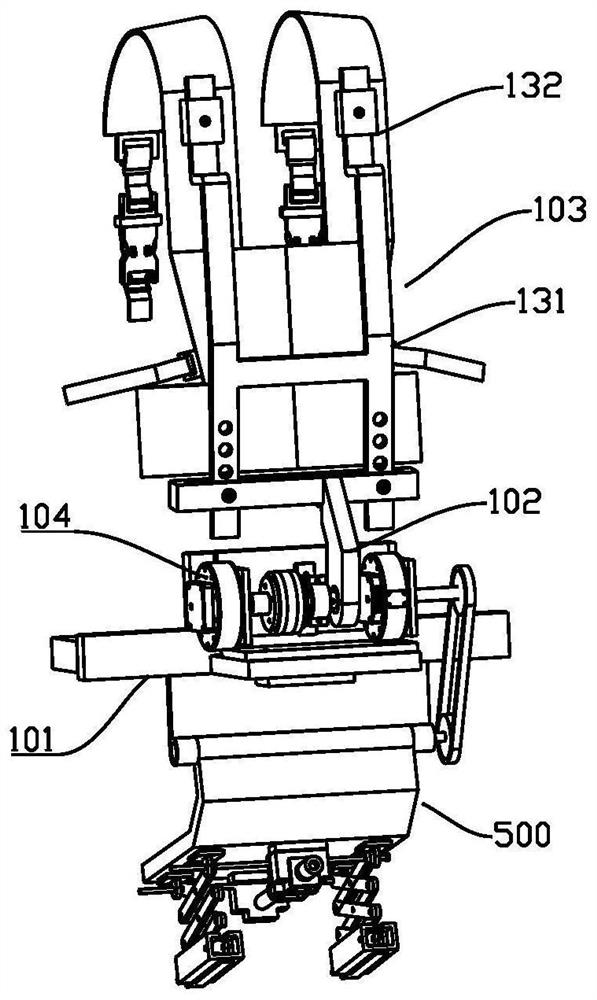
[0064] Such as image 3 with 4 , the auxiliary balance mechanism includes a first structural member 101 arranged at the waist of the human body when worn, ...
Embodiment 2
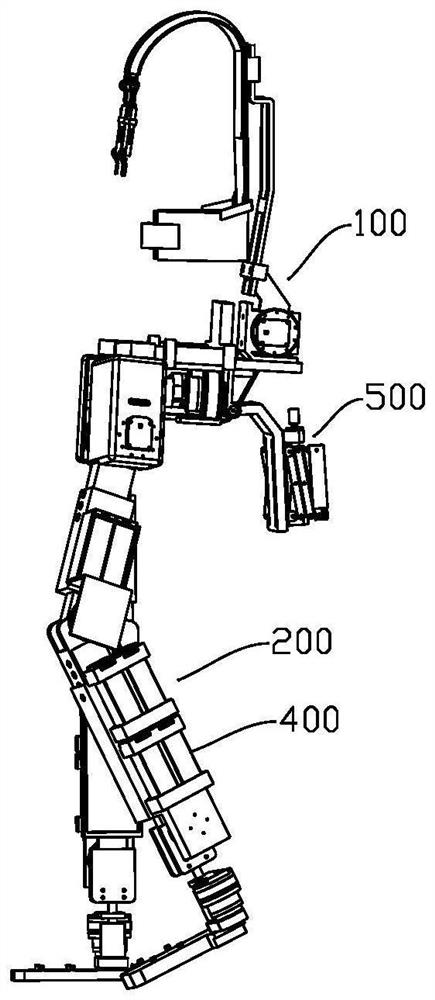
[0070] This embodiment is a further improvement made on the basis of Embodiment 1. Specifically, the structure of the leg assist mechanism is designed. While forming support for the lower part, it provides assistance for the completion of walking movements of the legs, helping users complete various walking movements.
[0071] Specifically, such as Figure 5 , the leg assist mechanism 200 of the lower limb parts in this embodiment includes a hip joint structural member 201, a knee joint structural member 202 and an ankle joint structural member 203 connected in sequence, wherein between the hip joint structural member and the knee joint structural member, the knee joint An adjustable connection structure is adopted between the structural part and the ankle joint structural part to realize the adjustment of the length of the leg assist mechanism, that is, the adjustment of the length of the thigh and the length of the calf, so as to be suitable for different users' actual condi...
Embodiment 3
[0082] The difference between the lower extremity exoskeleton robot in this embodiment and the first embodiment is:
[0083] The lower extremity exoskeleton robot in this embodiment is provided with a seat part 500, the seat part 500 is connected to the auxiliary part 100, is connected to the auxiliary part in rotation, and can rotate in the sagittal plane of the human body relative to the coronal axis of the human body; When the human body is in a sitting position, the seat part can be rotated to a horizontal state, and at the same time a part of the seat part can be expanded and supported on the ground for supporting the human body and providing a platform for the user to rest.
[0084] Specifically, such as Figure 8 with 9 , the seat component 500 in this embodiment includes a seat component 501 and a second drive member, wherein the seat component 501 is rotationally connected with the first structural member 101 of the auxiliary component; the second drive component is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com