


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Obstacle avoidance method and system for unmanned cleaning vehicle in dynamic environment
A dynamic environment and vehicle cleaning technology, applied in control/regulation systems, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of processor performance requirements, large amount of information, and poor cleaning ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
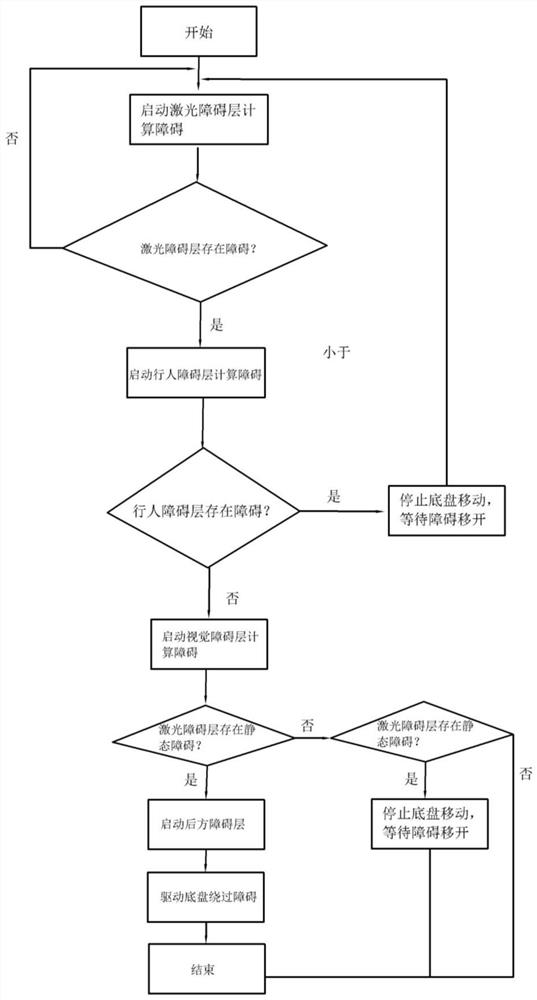
[0040] refer to figure 1 , an obstacle avoidance method for an unmanned cleaning vehicle in a dynamic environment, comprising the following steps,
[0041] Use the laser radar and binocular camera set under the unmanned cleaning vehicle to establish a factory scene map, and layer the map. The laser radar is a single-line radar used to detect environmental obstacles around the unmanned cleaning vehicle; the thermal infrared sensor in front It is used to detect pedestrians; the rear ultrasonic sensor is designed for safety to avoid hitting objects or pedestrians when reversing; the front binocular camera is used to detect, classify and identify objects near the vehicle; the vehicle chassis is a four-wheel drive structure, Used to control the movement of the vehicle, and to load other parts of the washing vehicle;
[0042] Then the map is divided into the original map layer and the comparison map layer. The comparison map layer includes the laser barrier layer, the visual barrie...
Embodiment 2
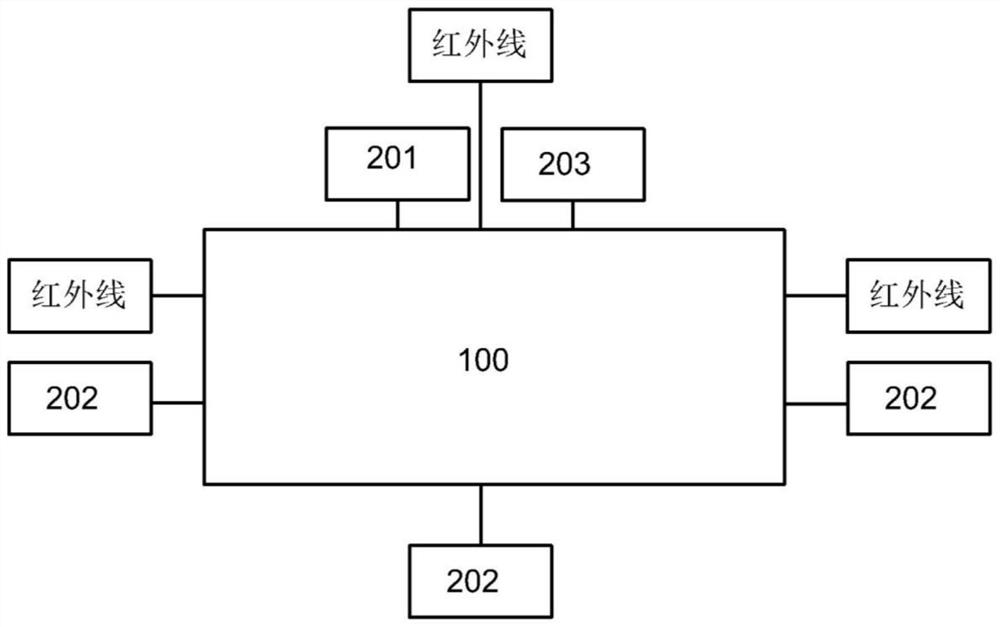
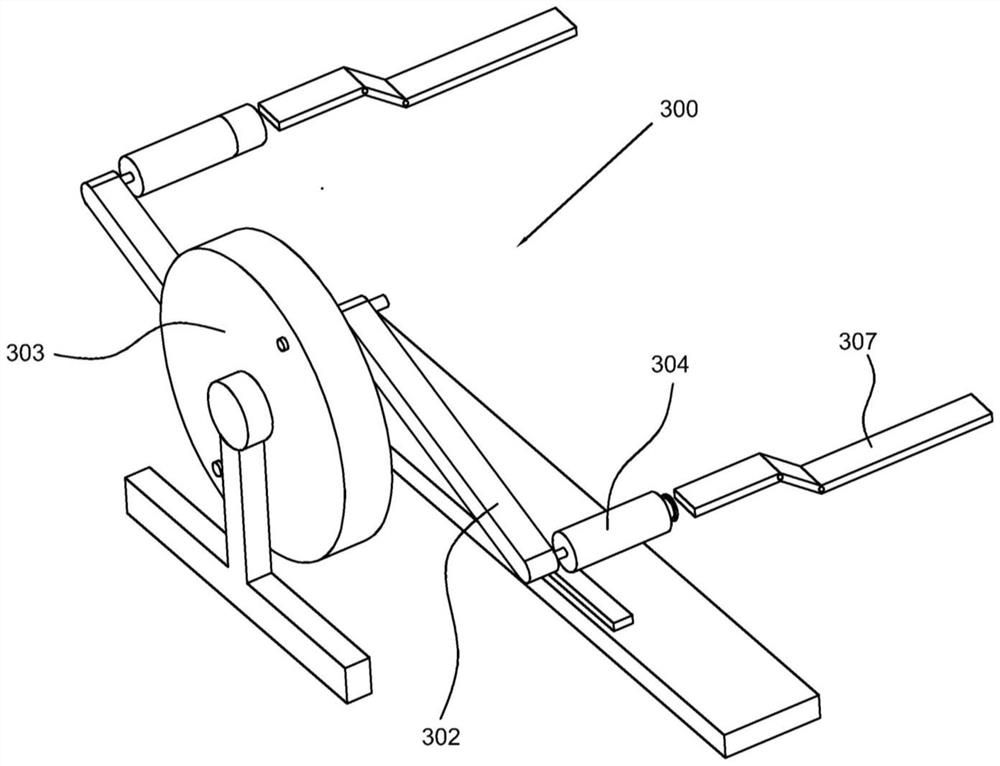
[0048] refer to Figure 2-5 , an obstacle avoidance system for an unmanned cleaning vehicle in a dynamic environment, including an on-vehicle assembly, including a chassis 100, a steering wheel arranged on the chassis 100, and a driving component arranged on the chassis 100; a measuring assembly 200, including The laser radar 201 at the front end and the side end position of the 100, the ultrasonic transceiver 202 arranged at the rear end and the side end position of the chassis 100, and the binocular camera 203 arranged at the front end of the chassis 100, and the front end of the chassis 100 is provided with an infrared camera near the binocular camera 203 position. Sensor 204; And, the obstacle removal assembly 300, the obstacle removal assembly 300 is arranged on the front end of the chassis 100, and the obstacle removal assembly 300 includes a toggle lever 301 arranged at the front end of the chassis 100, a driving lever 302 arranged at the rear end of the toggle lever 301...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com