Driving track prediction method and device and automatic driving vehicle
A technology of driving trajectory and automatic driving, which is applied in the prediction of driving trajectory and the field of automatic driving vehicles, and can solve problems such as wrong prediction trajectory, easy prediction error, and low prediction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0035] figure 1 It is a schematic flowchart of a method for predicting a driving trajectory provided by an embodiment of the present invention, which consists of figure 1 Visible, this method comprises the following steps:
[0036] Step S101: Obtain trajectory information of the target vehicle; wherein, the driving characteristic information includes position, vehicle speed and steering angle.
[0037] In one of the possible application scenarios, the above method for predicting the driving trajectory is applied to the own vehicle (hereinafter referred to as the driving vehicle) to predict the driving trajectory of other vehicles. For example, when the host vehicle is traveling on a road, the trajectory of an oncoming vehicle or a sideways vehicle is predicted.
[0038] Wherein, the acquisition of the above-mentioned driving feature information of the target vehicle is generally extracted from the perception information of the driving vehicle. The perception information of ...
Embodiment 2
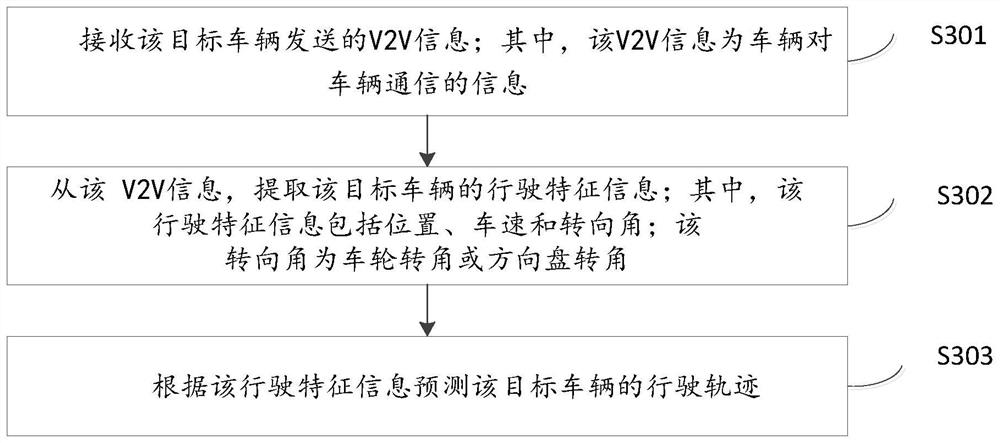
[0050] exist figure 1 On the basis of the trajectory prediction method shown above, another driving trajectory prediction method is provided in the embodiment of the present invention. see image 3 The flow chart of a trajectory prediction method for a vehicle fusion V2V at an intersection is shown, as shown in image 3 see:
[0051] Step S301: Receive V2V information sent by the target vehicle; wherein, the V2V information is vehicle-to-vehicle communication information.
[0052] In this embodiment, it is assumed that the application scenario is that a vehicle traveling on a road needs to predict the trajectories of other vehicles. Wherein, V2V communication devices (or V2X devices) are installed in both the own vehicle and the target vehicle, wherein the V2V communication device in the own vehicle can receive the V2V information sent by the V2V devices in other vehicles, and the target vehicle can also receive the V2V information sent by the own vehicle. V2V information ...
Embodiment 3
[0070] An embodiment of the present invention provides an automatic driving vehicle, such as Image 6 As shown, it is a schematic structural diagram of an automatic driving vehicle provided by an embodiment of the present invention.
[0071] The vehicle controller 62 is used to implement the above-mentioned vehicle control method.
[0072] The memory 63 stores computer-executable instructions that can be executed by the vehicle controller, and the vehicle controller executes the computer-executable instructions to implement any one of the above methods for predicting the driving trajectory. The vehicle controller 62 is connected to the memory 63 .
[0073] The vehicle controller 62 and the memory 63 are both arranged on the vehicle body 61 .
[0074] On the basis of the above automatic driving vehicle, this embodiment also provides another automatic driving vehicle. The self-driving vehicle also includes a vehicle networking module, configured to receive the V2V information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com