Mechanical arm intelligent teaching method based on computer vision and application
A technology of computer vision and teaching methods, applied in computing, manipulators, educational appliances, etc., can solve the problems of small load, low safety factor, high cost, etc., and achieve the effect of small load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] Below in conjunction with embodiment and accompanying drawing, the present invention will be further described, but this is not used as a limitation to the protection scope of the claims of the present application.
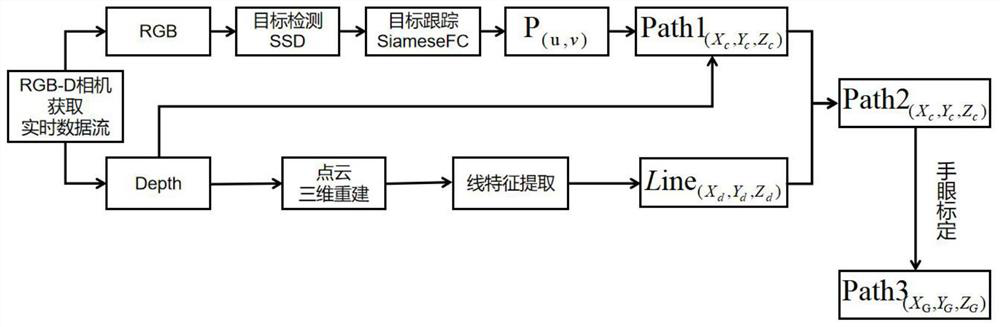
[0043] This embodiment takes the teaching of the corner path in the architectural scene (the target first moves down along the vertical wall to the corner, and then moves horizontally along the ground, and the movement path is L-shaped) as an example. Due to the position of the corner in the architectural scene Each is different. If you follow the traditional teaching method, you need to repeat a complex teaching with a low safety factor for each scene. Therefore, the introduction of target detection, target tracking, and 3D reconstruction in computer vision can obtain accurate robotic arm work. path, and transmit it to the control system in real time to control the movement of the robotic arm according to the working path. The teaching process is: the hand...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com