


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A dual-mode robot for underwater cruise and wall climbing
A robot and dual-mode technology, applied in underwater operation equipment, motor vehicles, ships, etc., can solve the problem of single function of underwater robots, and achieve the effects of high energy utilization efficiency, strong applicability, and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
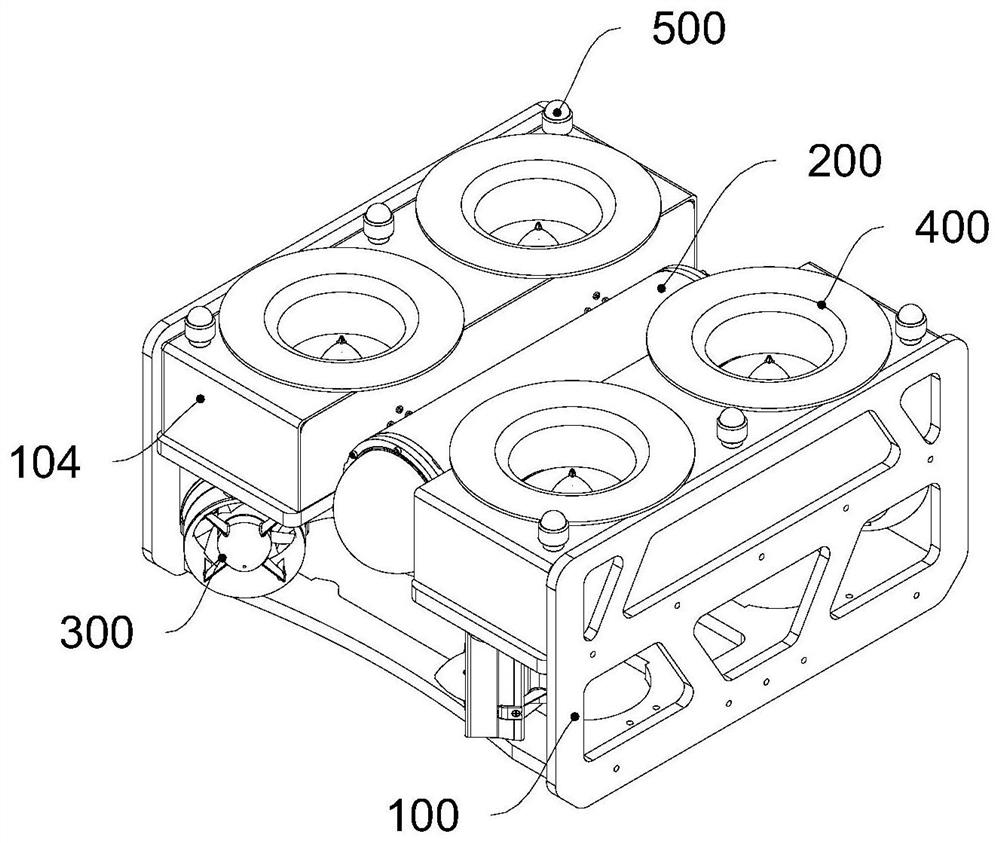
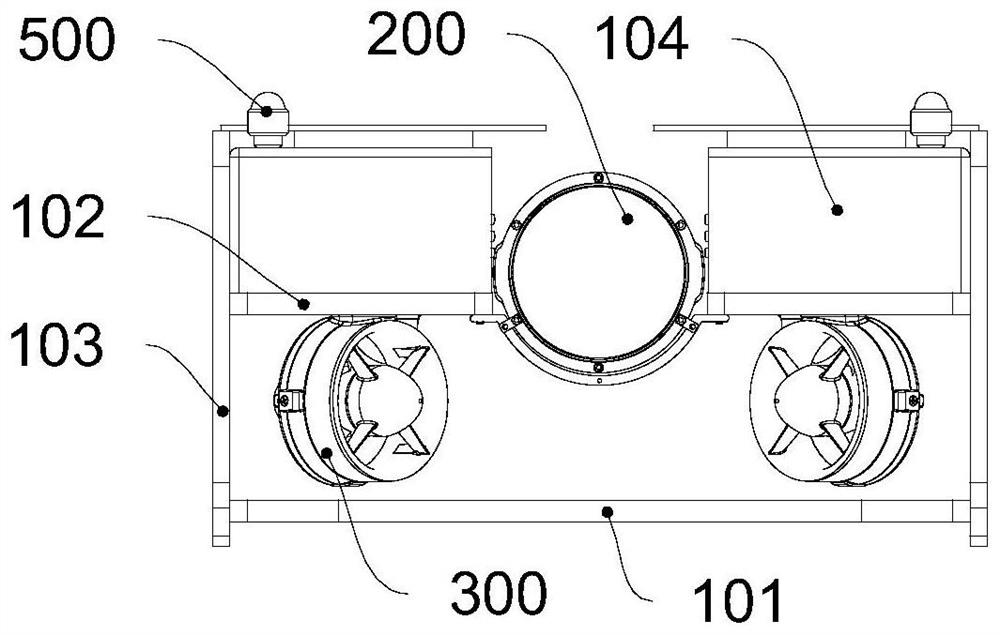
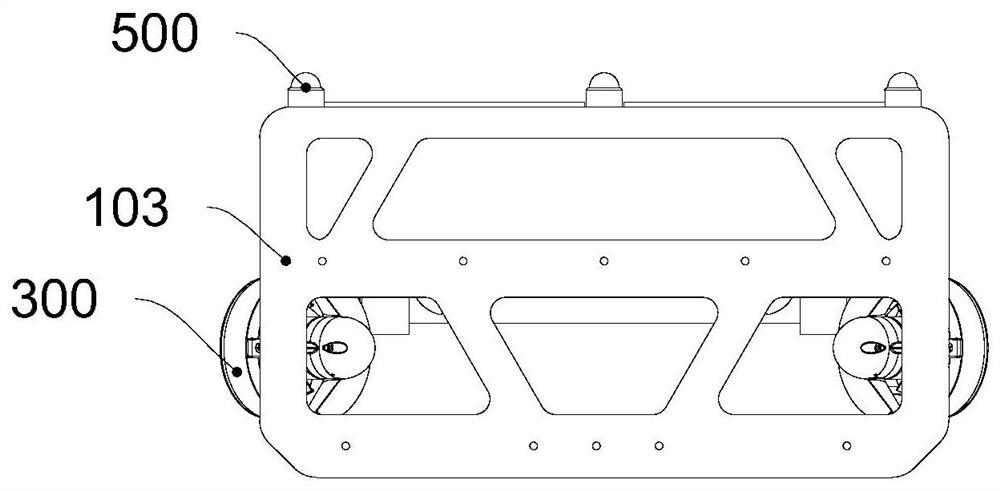
[0033] see Figure 1 to Figure 5 , the underwater cruise and wall-climbing dual-mode robot of this embodiment includes a frame 100, an accommodation cavity 200, a drive module and an adsorption module.
[0034] Among them, various control hardware and sensor modules are placed inside the accommodating cavity 200 , and the camera module is installed inside the dome cover area of the accommodating cavity 200 , and the viewing angle is controlled by the gimbal steering gear.
[0035] The drive module includes two sets of first thrusters 300 symmetrically arranged along the center line of the frame 100 , and each set of first thrusters includes two sets of first thrusters 300 arranged at the front and rear ends of the frame 100 . The propulsion direction of the first propeller 300 is the horizontal direction. The first propellers are arranged at an angle of 45 degrees with the central axis of the robot in the horizontal direction.
[0036] The adsorption module includes two se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com