Dense reconstruction method of UAV scene based on vi-slam and depth estimation network
A VI-SLAM and depth estimation technology, applied in the field of virtual reality, can solve the problem that large-scale scenes cannot be reconstructed quickly and densely, and achieve the effects of good generalization ability, fast operation efficiency and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention is described in further detail below in conjunction with the accompanying drawings and implementation examples:
[0061] The basic operation of the UAV scene reconstruction method in the present invention is to use the UAV equipped with IMU components to photograph the three-dimensional environment, transmit the obtained information to the back end for processing, and output the dense reconstruction point cloud rendering of the UAV scene. .
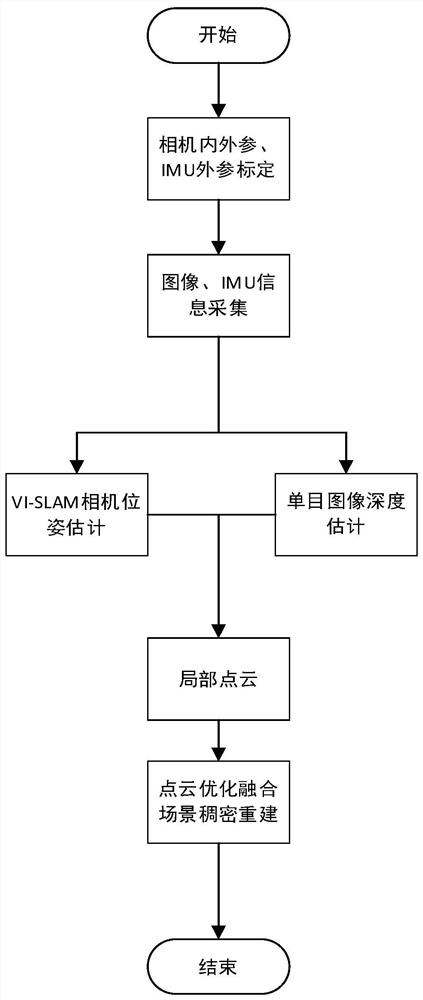
[0062] like figure 1 As shown, the steps of the UAV 3D reconstruction method based on VI-SLAM and depth estimation network of the present invention are as follows:
[0063] (1) Fix the inertial navigation device IMU to the drone, and calibrate the internal parameters, external parameters and IMU external parameters of the drone's own monocular camera;
[0064] (2) Use the UAV monocular camera and IMU to collect the image sequence and IMU information of the UAV scene;
[0065] (3) Use VI-SLAM to process the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com