Aerial survey method and system based on real-time dense three-dimensional point cloud of unmanned aerial vehicle and DSM
A 3D point cloud and UAV technology, applied in 3D modeling, computer parts, character and pattern recognition, etc., can solve the problems of general accuracy and high GPS requirements, and achieve low cost, fast speed and rich output content Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
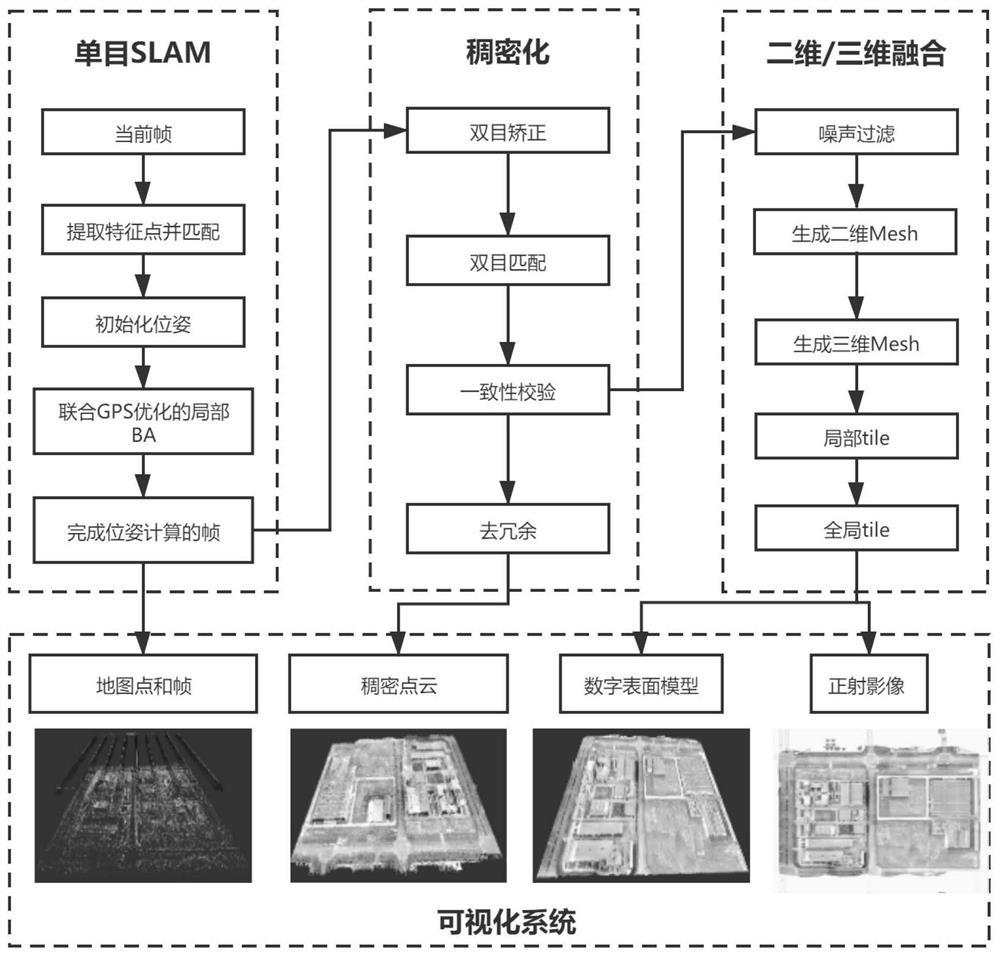
[0079] An aerial survey method based on UAV real-time dense 3D point cloud and DSM, see figure 1 , including the following steps:
[0080] S1: Obtain the original image captured by the camera during the flight of the drone, and use SLAM technology to estimate the camera pose of the original image; specifically include:
[0081] S11: Read the camera type corresponding to the camera in the drone from the preset camera calibration library, obtain a distortion parameter, and use the distortion parameter to perform de-distortion processing on the original image to obtain a de-distorted image;
[0082] S12: Obtain the EXIF information and GPS information of the original image; the EXIF information includes information describing the shooting camera, shooting time, angle, location, angle, etc. included in the image. This method can also obtain the camera type through EXIF information, and then search the corresponding calibration information from the camera calibration library...
Embodiment 2
[0136] An aerial survey system based on UAV real-time dense 3D point cloud and DSM, see Figure 6 ,include:
[0137] Acquisition unit: used to obtain the original image captured by the camera during the flight of the drone, and use SLAM technology to estimate the camera pose of the original image;
[0138] Optimization unit: used for nonlinear optimization of the camera pose of the original image to obtain the optimal pose;
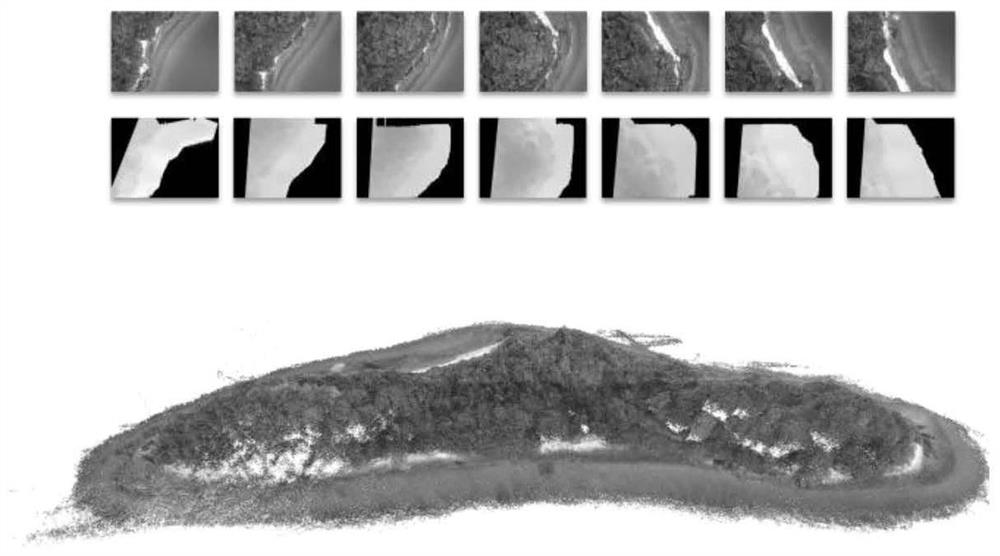
[0139] A three-dimensional point cloud generation unit: used to densify two consecutive frames of original images using the optimal pose of the original image to obtain a depth map; filter the depth map by using a consistency check to obtain a three-dimensional point cloud;
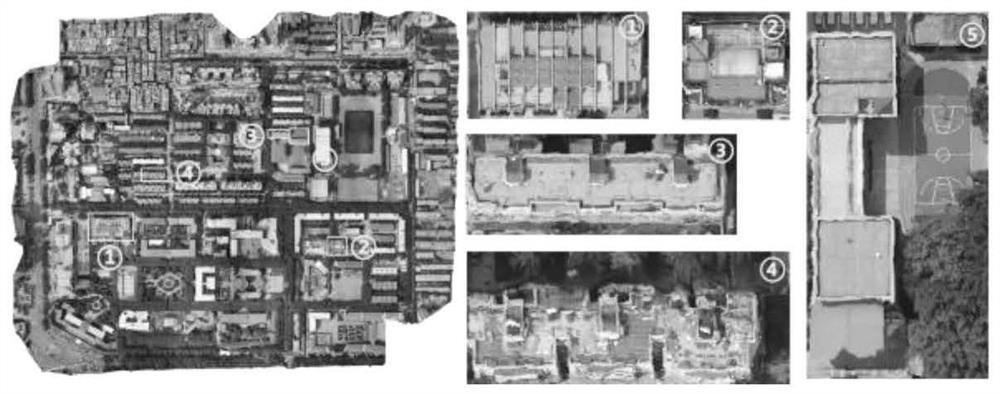
[0140] Model generation unit: used to generate DOM models, DEM models and DSM models using 3D point clouds, and perform multi-band fusion on DOM models, DEM models and DSM models to obtain global DEM models, global DOM models and global DSM models;
[0141] A map generation unit: u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com