Unmanned aerial vehicle path and action planning algorithm for indoor positioning information collection
A technology for information collection and indoor positioning, which is applied to services, computing, and wireless communications based on specific environments to save energy and improve scalability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The invention will be described in further detail below in conjunction with the accompanying drawings.
[0032] (1) Indoor environment and basic motion modeling of UAV
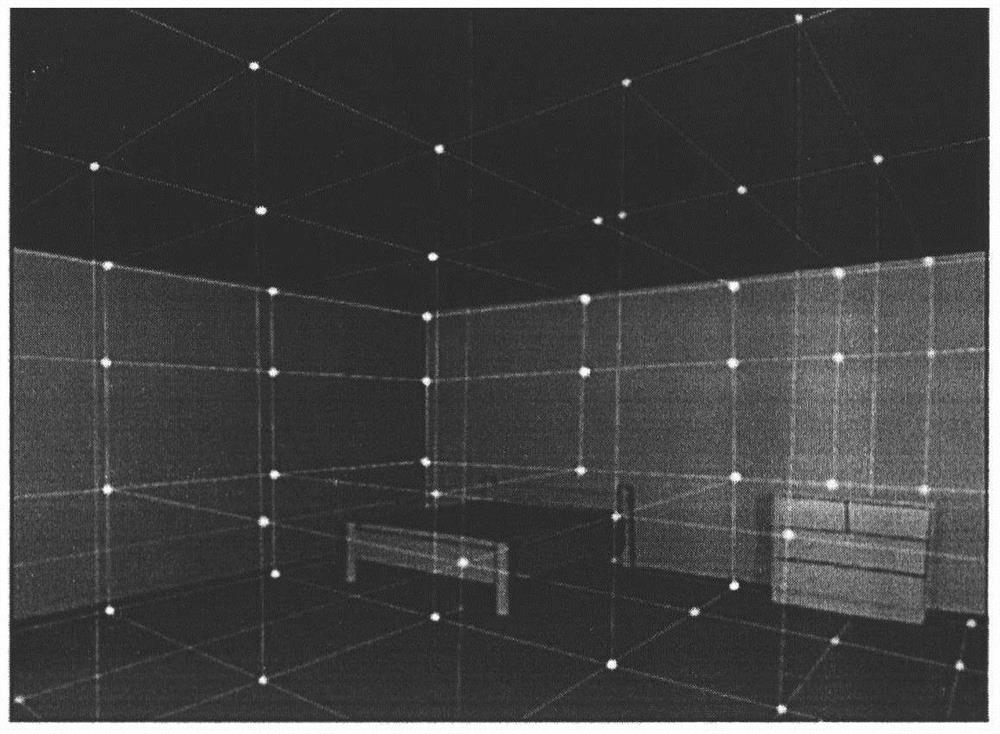
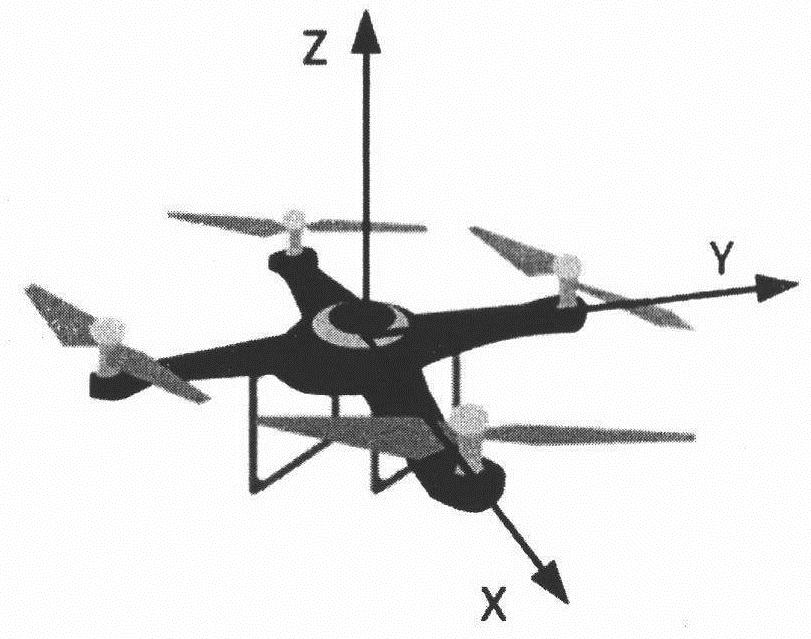
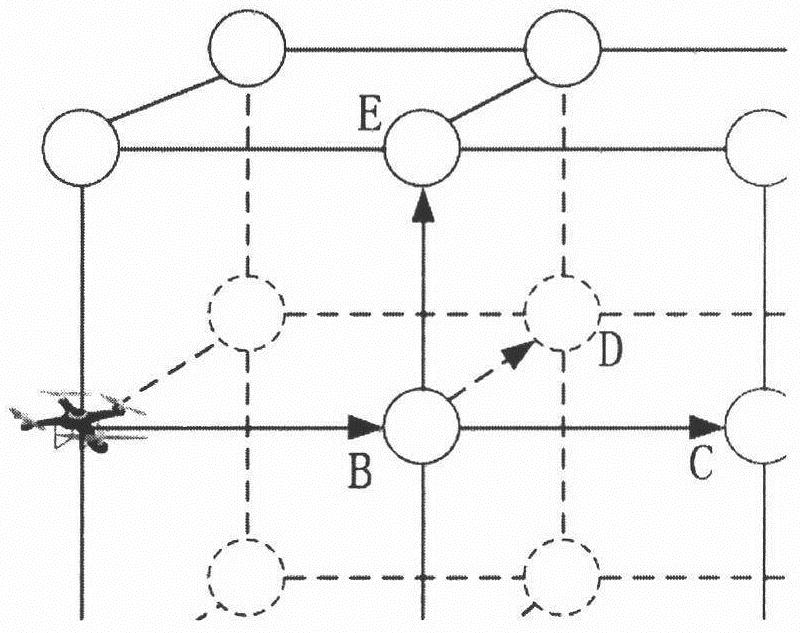
[0033] Divide the indoor environment into cubes of equal volume, and a cube represents a unit space, such as figure 1 . Use a point located in the center of the cube to represent this unit space. If two unit spaces are adjacent and there is no obstacle blocking them, there is a connecting line between their points. Usually the indoor environment is relatively complex. In order to avoid the UAV from colliding with indoor obstacles to a greater extent and reduce the energy consumption generated by the UAV avoiding obstacles, we set the movement direction of the UAV to six. The axis can be represented by the positive and negative directions of the three coordinate axes, such as figure 2 . like image 3 , the UAV can move on the edge of the graph.
[0034] (1) Establishing the motion energy model of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com