Ship course model predictive control algorithm design method under multiple constraint conditions
A technology of model predictive control and algorithm design, applied in two-dimensional position/channel control, control/regulation system, non-electric variable control and other directions, which can solve the problems of low ship speed and poor rudder efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
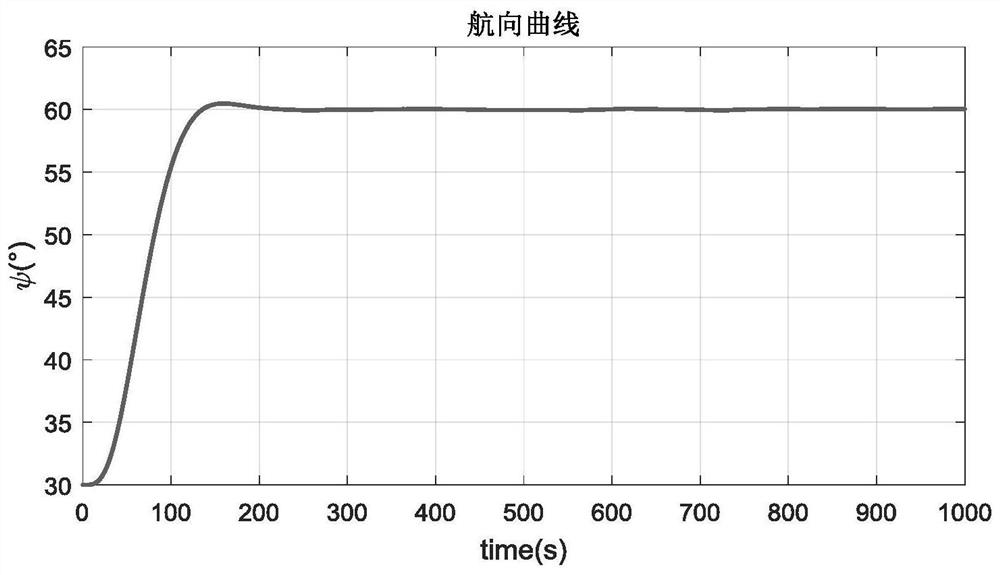
[0214] Taking a certain type of ship motion control system as an example, the parameter value of the heading model predictive controller is: n y =35,n u =15, Q=0.2I ny×ny , R=20I nu×nu , the rudder rudder angle amplitude is set to 10°, the rudder speed amplitude is limited to 1.5° / s by adding the state quantity constraints, the initial heading is 30°, the target heading is 60°, the initial speed is set to 8kn, and the simulation sampling time is set to It is set as 0.1s, and the heading deviation is relaxed by 2°. The simulation results are as follows image 3 and Figure 4 As shown, under the same simulation conditions, the control effect under the PID control algorithm is as follows: Figure 5 and Figure 6 As shown, the abscissa represents the time, and the ordinate represents the change angle. By comparison, it can be seen that the course control of the present invention changes more smoothly, ensuring the smooth and low-noise navigation of the ship.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com