All-round intelligent smelting slag fishing robot
An all-round, robotic technology, applied in the direction of manipulator, mechanical cleaning, charging processing type, etc., can solve the problems of not being able to grasp the smelting furnace scum in all directions, polluting the production site of production equipment, and major safety risks. The scope of application, the effect of improving the grasping accuracy, and improving the flexibility of the equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
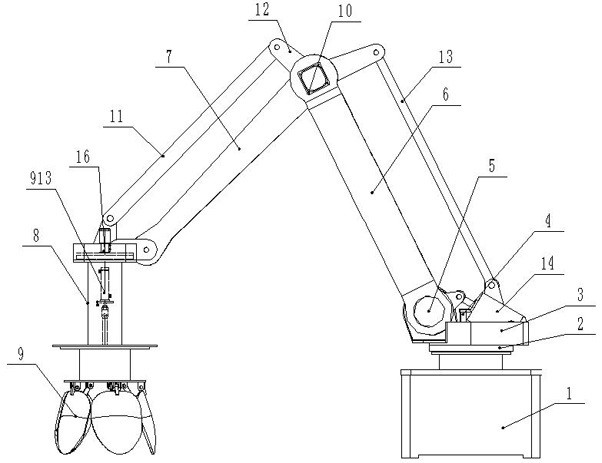
[0046] Such as Figure 1-5As shown together, this embodiment provides an all-round intelligent smelting slag removal robot, which includes a grasping mechanism for performing slag removal, an operating mechanism that drives the grasping mechanism to move in multiple directions, and maintains the grasping mechanism to keep vertical during the movement process. The balance mechanism; one end of the operating mechanism is connected to the base 1, and the other end is connected to the grasping mechanism. One end of the balance mechanism is connected to the grasping mechanism, and the other end is connected to the base 1. Institutional connections.
[0047] The base 1 is fixed on the ground, and a slewing support 2 is installed on the slewing support 2, and a slewing disk 3 is installed on the slewing support 2; the slewing support 2 is connected with the first servo motor 4, and the first servo motor 4 Drive the slewing bearing 2 to drive the slewing disk 3 to rotate, so that the...
Embodiment 2
[0067] Such as Figure 6-7 As shown together, this embodiment provides an all-round intelligent smelting and slag removal robot. The difference between this embodiment and Embodiment 1 is that the grasping mechanism is a split gripper assembly 15, and the split gripper The hand assembly 15 includes two grippers 151 arranged symmetrically, and the two grippers 151 are connected with the opening and closing mechanism 152, and the opening and closing are realized through the opening and closing mechanism 152, and the opening and closing mechanism 152 is connected with the telescopic rod of the oil cylinder 153 , the opening and closing mechanism 152 is driven by the oil cylinder 153 to realize the opening and closing of the split gripper assembly 15 .
[0068] The opening and closing mechanism 152 is arranged on a fixing frame 155 , and the fixing frame 155 is fixed on the connecting arm 8 so as to be connected to the running mechanism through the split handle assembly 15 .
[0...
Embodiment 3
[0072] Such as Figure 8 As shown, this embodiment provides an all-round intelligent smelting and slag removal robot. The difference between this embodiment and Embodiment 2 is that both the gripper 151 and the slag removal gripper 154 are toothed structures.
[0073] The slag removal robot described in the present invention can use hydraulic, electric, pneumatic, and mechanical powers to realize remote control operation, realize automatic operation, and realize long-distance slag removal; it is mainly suitable for steel, iron, copper, aluminum, and various non-ferrous metals, smelting Process waste removal.
[0074] The setting of the running mechanism in the present invention can make the running mechanism drive the grasping mechanism to move up and down at equal distances, and move back and forth at equal heights through the linkage of the second servo motor and the third servo motor, and the second servo motor does not act Under the circumstances, the independent action o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com